Určte dĺžku a smer kosínusov kolmice. Smerové kosínusy vektorov
Nech je daný vektor. Jednotkový vektor v rovnakom smere ako  (vektorový vektor
(vektorový vektor  ) sa zistí podľa vzorca:
) sa zistí podľa vzorca:
 .
.
Nechajte os  zviera uhly so súradnicovými osami
zviera uhly so súradnicovými osami  .Smerové kosínusy osi
.Smerové kosínusy osi  kosínusy týchto uhlov sa nazývajú: Ak smer
kosínusy týchto uhlov sa nazývajú: Ak smer  daný jednotkovým vektorom
daný jednotkovým vektorom  , potom smerové kosínusy slúžia ako jeho súradnice, t.j.:
, potom smerové kosínusy slúžia ako jeho súradnice, t.j.:
 .
.
Smerové kosínusy sú spojené vzťahom:
Ak smer  daný ľubovoľným vektorom
daný ľubovoľným vektorom  , potom nájdite jednotkový vektor tohto vektora a porovnajte ho s výrazom pre jednotkový vektor
, potom nájdite jednotkový vektor tohto vektora a porovnajte ho s výrazom pre jednotkový vektor  , získaj:
, získaj:

Skalárny súčin
Skalárny súčin dva vektory
dva vektory  a
a  nazývané číslo, ktoré sa rovná súčinu ich dĺžok a kosínusu uhla medzi nimi:
nazývané číslo, ktoré sa rovná súčinu ich dĺžok a kosínusu uhla medzi nimi:  .
.
Skalárny produkt má nasledujúce vlastnosti:

teda  .
.
Geometrický význam skalárneho súčinu: bodový súčin vektora a jednotkového vektora  rovná projekcii vektora
rovná projekcii vektora  v určenom smere
v určenom smere  , t.j.
, t.j.  .
.
Z definície skalárneho súčinu vyplýva nasledujúca tabuľka násobenia ortov  :
:
 .
.
Ak sú vektory dané ich súradnicami  a
a  , t.j.
, t.j.  ,
, , potom skalárnym vynásobením týchto vektorov a použitím multiplikačnej tabuľky orts získame výraz pre skalárny súčin
, potom skalárnym vynásobením týchto vektorov a použitím multiplikačnej tabuľky orts získame výraz pre skalárny súčin  cez súradnice vektorov:
cez súradnice vektorov:
 .
.
vektorový produkt
Krížový súčin vektora na vektor
na vektor  nazývaný vektor
nazývaný vektor  , ktorého dĺžku a smer určujú podmienky:
, ktorého dĺžku a smer určujú podmienky:

Vektorový produkt má nasledujúce vlastnosti:

Z prvých troch vlastností vyplýva, že vektorové násobenie súčtu vektorov súčtom vektorov sa riadi bežnými pravidlami pre násobenie polynómov. Je len potrebné zabezpečiť, aby sa poradie násobiteľov nezmenilo.
Základné jednotkové vektory sa násobia takto:

Ak  a
a  , potom s prihliadnutím na vlastnosti vektorového súčinu vektorov môžeme zo súradníc faktorových vektorov odvodiť pravidlo na výpočet súradníc vektorového súčinu:
, potom s prihliadnutím na vlastnosti vektorového súčinu vektorov môžeme zo súradníc faktorových vektorov odvodiť pravidlo na výpočet súradníc vektorového súčinu:
Ak vezmeme do úvahy pravidlá pre násobenie ortov získaných vyššie, potom:
Kompaktnejšiu formu zápisu výrazu na výpočet súradníc vektorového súčinu dvoch vektorov možno zostrojiť, ak zavedieme pojem maticový determinant.
Zvážte špeciálny prípad, keď vektory  a
a  patria do lietadla
patria do lietadla  , t.j. môžu byť zastúpené ako
, t.j. môžu byť zastúpené ako  a
a  .
.
Ak sú súradnice vektorov zapísané vo forme tabuľky takto:  , potom môžeme povedať, že sa z nich vytvorí štvorcová matica druhého rádu, t.j. veľkosť
, potom môžeme povedať, že sa z nich vytvorí štvorcová matica druhého rádu, t.j. veľkosť  pozostávajúce z dvoch riadkov a dvoch stĺpcov. Každá štvorcová matica má priradené číslo, ktoré sa vypočíta z prvkov matice podľa určitých pravidiel a nazýva sa determinant. Determinant matice druhého rádu sa rovná rozdielu medzi produktmi prvkov hlavnej a sekundárnej uhlopriečky:
pozostávajúce z dvoch riadkov a dvoch stĺpcov. Každá štvorcová matica má priradené číslo, ktoré sa vypočíta z prvkov matice podľa určitých pravidiel a nazýva sa determinant. Determinant matice druhého rádu sa rovná rozdielu medzi produktmi prvkov hlavnej a sekundárnej uhlopriečky:
 .
.
V tomto prípade:

Absolútna hodnota determinantu sa teda rovná ploche rovnobežníka postaveného na vektoroch  a
a  ako na bokoch.
ako na bokoch.
Ak tento výraz porovnáme so vzorcom vektorového súčinu (4.7), potom:
|
|

Tento výraz je vzorcom na výpočet determinantu matice tretieho rádu z prvého riadku.
takto:

Maticový determinant tretieho rádu sa vypočíta takto:


a je algebraickým súčtom šiestich členov.
Vzorec na výpočet determinantu matice tretieho rádu je ľahko zapamätateľný, ak ho použijete pravidloSarrus, ktorý je formulovaný takto:
Každý člen je súčinom troch prvkov umiestnených v rôznych stĺpcoch a rôznych riadkoch matice;
Znamienko plus má produkty prvkov, ktoré tvoria trojuholníky so stranou rovnobežnou s hlavnou uhlopriečkou;
Znamienko mínus sa dáva súčinom prvkov patriacich do vedľajšej uhlopriečky a dvom súčinom prvkov, ktoré tvoria trojuholníky so stranami rovnobežnými s vedľajšou uhlopriečkou.

![]()
Vektorový smer kosínusy.
Smerové kosínusy vektora a sú kosínusy uhlov, ktoré tvorí vektor s kladnými poloosami súradníc.
Na nájdenie smerových kosínusov vektora a je potrebné rozdeliť zodpovedajúce súradnice vektora modulom vektora.
Nehnuteľnosť: Súčet štvorcov smerových kosínusov sa rovná jednej.
Takže v prípade problému s lietadlom smerové kosínusy vektora a = (ax; ay) nájdeme podľa vzorcov:
Príklad výpočtu smerových kosínusov vektora:
Nájdite smerové kosínusy vektora a = (3; 4).
Riešenie: |a| =
Takže v v prípade priestorového problému smerové kosínusy vektora a = (ax; ay; az) nájdeme podľa vzorcov:
Príklad výpočtu smerových kosínusov vektora
Nájdite smerové kosínusy vektora a = (2; 4; 4).
Riešenie: |a| =
|
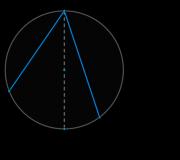
Smer vektora v priestore je určený uhlami, ktoré zviera vektor so súradnicovými osami (obr. 12). Kosínusy týchto uhlov sa nazývajú smerové kosínusy vektora: , , .
Z vlastností projekcií:, , . teda Je ľahké to ukázať 2) súradnice ľubovoľného jednotkového vektora sa zhodujú s jeho smerovými kosínusmi: . |

"Ako nájsť smerové kosínusy vektora"
Označme alfa, beta a gama uhly, ktoré zviera vektor a s kladným smerom súradnicových osí (pozri obr. 1). Kosínusy týchto uhlov sa nazývajú smerové kosínusy vektora a.
Keďže súradnice a v kartézskom pravouhlom súradnicovom systéme sa rovnajú projekciám vektora na súradnicové osi, potom a1 = |a|cos(alfa), a2 = |a|cos(beta), a3 = |a|cos (gama). Preto: cos (alfa)=a1||a|, cos(beta)=a2||a|, cos(gama)= a3/|a|. Navyše |a|=sqrt(a1^2+ a2^2+ a3^2). Takže cos(alfa)=a1|sqrt(a1^2+ a2^2+ a3^2), cos(beta) =a2|sqrt(a1^2+ a2^2+ a3^2), cos(gama)= a3/sqrt(a1^2+ a2^2+ a3^2).
Treba poznamenať hlavnú vlastnosť smerových kosínusov. Súčet druhých mocnín smerových kosínusov vektora sa rovná jednej. Naozaj, cos^2(alfa)+cos^2(beta)+cos^2(gama)= = a1^2|(a1^2+ a2^2+ a3^2)+ a2^2|(a1^2 + a2^2+ a3^2)+ a3^2/(a1^2+ a2^2+ a3^2) = =(a1^2+ a2^2+ a3^2)|(a1^2+ a2^ 2+ a3^2) = 1.
Prvý spôsob
Príklad: daný: vektor a=(1, 3, 5). Nájdite jeho kosínusy smeru. rozhodnutie. V súlade s tým, čo sme našli, vypíšeme: |a|= sqrt(ax^2+ ay^2+ az^2)=sqrt(1+9 +25)=sqrt(35)=5,91. Odpoveď teda možno napísať v nasledujúcom tvare: (cos(alfa), cos(beta), cos(gama))=(1/sqrt(35), 3/sqrt(35), 5/(35)) = (0,16; 0,5; 0,84).
Druhý spôsob
Pri hľadaní smerových kosínusov vektora a môžete použiť techniku na určenie kosínusov uhlov pomocou skalárneho súčinu. V tomto prípade máme na mysli uhly medzi a a smerovými jednotkovými vektormi pravouhlých karteziánskych súradníc i, j a k. Ich súradnice sú (1, 0, 0), (0, 1, 0), (0, 0, 1). Je potrebné pripomenúť, že skalárny súčin vektorov je definovaný nasledovne.
Ak je uhol medzi vektormi φ, potom skalárny súčin dvoch vetrov (podľa definície) je číslo rovné súčinu modulov vektorov pomocou cosφ. (a, b) = |a||b|cos f. Potom, ak b=i, potom (a, i) = |a||i|cos(alfa) alebo a1 = |a|cos(alfa). Ďalej sa všetky akcie vykonávajú podobne ako pri metóde 1, berúc do úvahy súradnice j a k.
toto sú kosínusy uhlov, ktoré vektor zviera s kladnými poloosami súradníc. Smerové kosínusy jednoznačne definujú smer vektora. Ak má vektor dĺžku 1, potom sa jeho smerové kosínusy rovnajú jeho súradniciam. Vo všeobecnosti platí, že pre vektor so súradnicami ( a; b; c) smerové kosínusy sa rovnajú:
kde a, b, g sú uhly, ktoré zviera vektor s osami X, r, z resp.
21) Rozklad vektora z hľadiska vektorov. Orta súradnicovej osi je označená , osi - by , osi - by (obr. 1).

Pre každý vektor, ktorý leží v rovine, prebieha nasledujúci rozklad:
Ak je vektor ![]() sa nachádza v priestore, potom expanzia z hľadiska jednotkových vektorov súradnicových osí má tvar:
sa nachádza v priestore, potom expanzia z hľadiska jednotkových vektorov súradnicových osí má tvar:
22)Skalárny súčin dva nenulové vektory a číslo rovné súčinu dĺžok týchto vektorov a kosínusu uhla medzi nimi sa nazýva:
23) Uhol medzi dvoma vektormi
Ak je uhol medzi dvoma vektormi ostrý, potom je ich bodový súčin kladný; ak je uhol medzi vektormi tupý, potom je skalárny súčin týchto vektorov záporný. Skalárny súčin dvoch nenulových vektorov je nula práve vtedy, ak sú tieto vektory ortogonálne.
24) Podmienka rovnobežnosti a kolmosti dvoch vektorov.
Podmienka kolmosti vektorov
Vektory sú kolmé práve vtedy, ak ich vnútorný súčin je nula.Dajú sa dva vektory a(xa;ya) a b(xb;yb). Tieto vektory budú kolmé, ak výraz xaxb + yayb = 0.

25) Vektorový súčin dvoch vektorov.
Vektorový súčin dvoch nekolineárnych vektorov je vektor c=a×b, ktorý spĺňa nasledujúce podmienky: 1) |c|=|a| |b| sin(a^b) 2) c⊥a, c⊥b 3) Vektory a, b, c tvoria správnu trojicu vektorov.
26) Kolineárne a koplanárne vektory.
Vektory sú kolineárne, ak úsečka prvého vektora súvisí s osou druhého vektora rovnakým spôsobom, ako je súradnica prvého vektora s osou druhého vektora. Sú uvedené dva vektory a (xa;áno) a b (xb;yb). Tieto vektory sú kolineárne, ak x a = xb a y a = yb, kde R.
Vektory −→ a,−→b a −→ c volal koplanárny ak existuje rovina, s ktorou sú rovnobežné.
27) Zmiešaný súčin troch vektorov. Zmiešaný súčin vektorov- skalárny súčin vektora a a vektorový súčin vektorov b a c. Nájdite zmiešaný súčin vektorov a = (1; 2; 3), b = (1; 1; 1), c = (1; 2; 1).
rozhodnutie:
1 1 1 + 1 1 2 + 1 2 3 - 1 1 3 - 1 1 2 - 1 1 2 = 1 + 2 + 6 - 3 - 2 - 2 = 2
28) Vzdialenosť medzi dvoma bodmi v rovine. Vzdialenosť medzi dvoma danými bodmi sa rovná druhej odmocnine súčtu druhých mocnín rozdielov rovnakých súradníc týchto bodov.
29) Rozdelenie segmentu v tomto smere. Ak bod M(x; y) leží na priamke prechádzajúcej dvoma danými bodmi ( , ) a ( , ) a je daný vzťah, v ktorom bod M delí úsečku , sú určené súradnice bodu M podľa vzorcov
Ak je bod M stredom segmentu, jeho súradnice sú určené vzorcami
30-31. Sklon priamky sa nazýva dotyčnica sklonu tejto priamky. Sklon priamky sa zvyčajne označuje písmenom k. Potom podľa definície
Čiarová rovnica so sklonom má tvar kde k- uhlový koeficient priamky, b je nejaké skutočné číslo. Rovnica priamky so sklonom môže nastaviť akúkoľvek priamku, ktorá nie je rovnobežná s osou Oj(pre priamku rovnobežnú s osou y nie je sklon definovaný).
33. Všeobecná rovnica priamky na rovine. Typ rovnice ![]() existuje všeobecná rovnica priamky Oxy. V závislosti od hodnôt konštánt A, B a C sú možné tieto špeciálne prípady:
existuje všeobecná rovnica priamky Oxy. V závislosti od hodnôt konštánt A, B a C sú možné tieto špeciálne prípady:
C \u003d 0, A ≠ 0, B ≠ 0 - čiara prechádza počiatkom
A \u003d 0, B ≠ 0, C ≠ 0 (By + C \u003d 0) - čiara je rovnobežná s osou Ox
B \u003d 0, A ≠ 0, C ≠ 0 ( Ax + C \u003d 0) - čiara je rovnobežná s osou Oy
B \u003d C \u003d 0, A ≠ 0 - priamka sa zhoduje s osou Oy
A \u003d C \u003d 0, B ≠ 0 - priamka sa zhoduje s osou Ox
34.Rovnica priamky v segmentoch na rovine v pravouhlom súradnicovom systéme Oxy má tvar kde a a b sú nejaké nenulové reálne čísla. Tento názov nie je náhodný, pretože ide o absolútne hodnoty čísel a a b rovná dĺžkam segmentov, ktoré priamka odreže na súradnicových osiach Vôl a Oj(segmenty sa počítajú od začiatku). Rovnica priamky v segmentoch teda uľahčuje zostavenie tejto priamky na výkrese. Za týmto účelom označte body súradnicami a v pravouhlom súradnicovom systéme v rovine a pomocou pravítka ich spojte priamkou.
35. Normálna rovnica priamky má tvar
kde je vzdialenosť od priamky k začiatku; je uhol medzi normálou k priamke a osou.
Normálnu rovnicu získame zo všeobecnej rovnice (1) jej vynásobením normalizačným faktorom , znamienko je opačné ako znamienko .
Kosínusy uhlov medzi priamkou a súradnicovými osami sa nazývajú smerové kosínusy, je uhol medzi priamkou a osou, je medzi priamkou a osou:
Normálnu rovnicu teda možno zapísať ako
Vzdialenosť od bodu do rovnej sa určuje podľa vzorca 
36. Vzdialenosť medzi bodom a čiarou sa vypočíta podľa tohto vzorca: ![]()
kde x 0 a y 0 sú súradnice bodu a A, B a C sú koeficienty zo všeobecnej rovnice priamky
37. Prevedenie všeobecnej rovnice priamky na normálnu. Rovnica a rovina sa v tomto kontexte od seba nelíšia v ničom inom ako v počte členov v rovniciach a rozmere priestoru. Preto najprv poviem všetko o rovine a na konci urobím výhradu k rovinke.
Nech je daná všeobecná rovnica roviny: Ax + By + Cz + D = 0.
;. dostaneme systém: g;Mc=cosb, MB=cosaUveďme to do normálneho tvaru. Aby sme to dosiahli, vynásobíme obe časti rovnice normalizačným faktorom M. Dostaneme: Max + Mvu + MSz + MD = 0. V tomto prípade МА=cos;.g;Mc=cosb, MB=cosa dostaneme systém:
M2 B2=cos2b
M2 C2 = cos2 g
Sčítaním všetkých rovníc systému dostaneme M*(A2 + B2 + C2) = 1 Teraz zostáva len vyjadriť M odtiaľto, aby sme vedeli, ktorým normalizačným faktorom sa musí pôvodná všeobecná rovnica vynásobiť, aby sa dostala do normálu. forma:
M \u003d - + 1 / ROOT KV A2 + B2 + C2
MD musí byť vždy menšie ako nula, preto sa znamienko čísla M berie opačne ako znamienko D.
S rovnicou priamky je všetko rovnaké, iba výraz C2 by sa mal zo vzorca pre M jednoducho odstrániť.
| Ax + Autor: + cz + D = 0, |
38.Všeobecná rovnica roviny v priestore sa nazýva rovnica tvaru
kde A 2 + B 2 + C 2 ≠ 0 .
V trojrozmernom priestore v karteziánskom súradnicovom systéme je ľubovoľná rovina opísaná rovnicou 1. stupňa (lineárna rovnica). Naopak, každá lineárna rovnica definuje rovinu.
40.Rovnica roviny v segmentoch. V pravouhlom súradnicovom systéme Oxyz v trojrozmernom priestore rovnica tvaru  , kde a, b a c sa volajú reálne čísla iné ako nula rovinná rovnica v segmentoch. Absolútne hodnoty čísel a, b a c rovná dĺžkam segmentov, ktoré rovina odreže na súradnicových osiach Vôl, Oj a Oz respektíve počítajúc od pôvodu. Znak čísla a, b a c ukazuje, v akom smere (kladnom alebo zápornom) sú segmenty vynesené na súradnicových osiach
, kde a, b a c sa volajú reálne čísla iné ako nula rovinná rovnica v segmentoch. Absolútne hodnoty čísel a, b a c rovná dĺžkam segmentov, ktoré rovina odreže na súradnicových osiach Vôl, Oj a Oz respektíve počítajúc od pôvodu. Znak čísla a, b a c ukazuje, v akom smere (kladnom alebo zápornom) sú segmenty vynesené na súradnicových osiach
41) Normálna rovnica roviny.
Normálna rovnica roviny je jej rovnica, zapísaná v tvare
kde , , sú smerové kosínusy normály roviny, napr
p je vzdialenosť od začiatku k rovine. Pri výpočte smerových kosínusov normály treba brať do úvahy, že smeruje z počiatku do roviny (ak rovina prechádza počiatkom, potom je výber kladného smeru normály ľahostajný).
42) Vzdialenosť od bodu k rovine.Nech je rovina daná rovnicou ![]() a dostal bod. Potom je vzdialenosť od bodu k rovine určená vzorcom
a dostal bod. Potom je vzdialenosť od bodu k rovine určená vzorcom
 |
Dôkaz. Vzdialenosť od bodu k rovine je podľa definície dĺžka kolmice spadnutej z bodu do roviny
Uhol medzi rovinami
Nech sú roviny a dané rovnicami a , resp. Je potrebné nájsť uhol medzi týmito rovinami.
Roviny, ktoré sa pretínajú, tvoria štyri dihedrálne uhly: dva tupé a dva ostré alebo štyri priame a oba tupé uhly sú si navzájom rovné a oba ostré sú si navzájom rovné. Vždy budeme hľadať ostrý uhol. Na určenie jeho hodnoty vezmeme bod na priesečníku rovín a v tomto bode v každej z nich
roviny nakreslíme kolmice na priesečník.
Nehnuteľnosť:
cos 2 α + cos 2 β + cos 2 γ = 1
b) definícia lineárnych operácií
súčet dvoch nekolineárnych vektorov a nazýva sa vektor pochádzajúci zo spoločného začiatku vektorov pozdĺž uhlopriečky rovnobežníka postaveného na týchto vektoroch

Rozdiel vektorov a sa nazýva súčet vektora a vektora opačného k vektoru: ![]() . Pripojte začiatky vektorov a potom vektor smeruje od konca vektora ku koncu vektora.
. Pripojte začiatky vektorov a potom vektor smeruje od konca vektora ku koncu vektora. 
práca vektor k číslu sa nazýva vektor s modulom a pre a pre . Geometricky násobenie číslom znamená "natiahnutie" vektora faktorom 1, pričom sa smer udrží v a zmení sa na opačný v .
Z vyššie uvedených pravidiel na sčítanie vektorov a ich násobenie číslom vyplývajú zrejmé tvrdenia:
1. ![]() (sčítanie je komutatívne);
(sčítanie je komutatívne);
2. ![]() (sčítanie je asociatívne);
(sčítanie je asociatívne);
3. ![]() (existencia nulového vektora);
(existencia nulového vektora);
4. ![]() (existencia opačného vektora);
(existencia opačného vektora);
5. ![]() (sčítanie je asociatívne);
(sčítanie je asociatívne);
6. (násobenie číslom je distributívne);
7. ![]() (vektorové sčítanie je distributívne);
(vektorové sčítanie je distributívne);
c) skalárny súčin a jeho hlavné vlastnosti
Skalárny súčin dvoch nenulových vektorov sa nazýva číslo rovné súčinu dĺžok týchto vektorov a kosínusu uhla medzi nimi. Ak je aspoň jeden z dvoch vektorov nulový, potom uhol medzi nimi nie je definovaný a skalárny súčin sa považuje za nulový. Skalárny súčin vektorov a je označený
 , kde a sú dĺžky vektorov a respektíve, a je uhol medzi vektormi a .
, kde a sú dĺžky vektorov a respektíve, a je uhol medzi vektormi a .
Skalárny súčin vektora so sebou samým sa nazýva bodový štvorec.
Vlastnosti skalárneho súčinu.
Pre všetky vektory a nasledujúce platí: bodové vlastnosti produktu:
vlastnosť komutativity skalárneho súčinu;
vlastnosť distributivity  alebo
alebo  ;
;
asociatívna vlastnosť  alebo
alebo  , kde je ľubovoľné reálne číslo;
, kde je ľubovoľné reálne číslo;
skalárny štvorec vektora je vždy nezáporný a práve vtedy, ak je vektor nula.
D) vektorový súčin a jeho vlastnosti
vektorový produkt vektor a až vektor b sa nazýva vektor c, ktorého dĺžka sa číselne rovná ploche rovnobežníka postaveného na vektoroch a a b, kolmých na rovinu týchto vektorov a nasmerovaných tak, aby od a po b bola čo najmenšia rotácia okolo vektora c je proti smeru hodinových ručičiek pri pohľade z koncového vektora c
Vzorce na výpočet krížového súčinu vektorov
vektorový produkt dva vektory a = (a x ; a y ; a z ) a b = (b x ; b y ; b z ) v karteziánskych súradniciach je vektor, ktorého hodnotu možno vypočítať pomocou nasledujúcich vzorcov:
- Krížový súčin dvoch nenulových vektorov aab je nulový práve vtedy, ak sú vektory kolineárne.
- Vektor c, ktorý sa rovná krížovému súčinu nenulových vektorov a a b, je kolmý na tieto vektory.
- a × b = -b × a
- (ka) × b = a × (k b) = k (a × b)
- (a + b) × c = a × c + b × c
Rovnica priamky na rovine
A) rovnica priamky so sklonom
Sklon priamky sa nazýva dotyčnica sklonu tejto priamky.
Sklon priamky sa zvyčajne označuje písmenom k. Potom podľa definície.
Ak je čiara rovnobežná s osou y, potom sklon neexistuje (v tomto prípade sa tiež hovorí, že sklon ide do nekonečna).
Pozitívny sklon priamky znamená nárast jej funkčného grafu, negatívny sklon znamená zníženie. Rovnica priamky so sklonom má tvar y=kx+b, kde k je sklon priamky, b je nejaké reálne číslo. Rovnica priamky so sklonom môže špecifikovať akúkoľvek priamku, ktorá nie je rovnobežná s osou Oy (pre priamku rovnobežnú s osou y nie je sklon definovaný).
B) typy rovníc s priamkou
Rovnica ![]() volal všeobecná rovnica priamky na povrchu.
volal všeobecná rovnica priamky na povrchu.
Ľubovoľná rovnica prvého stupňa s dvoma premennými X a r milý ![]() , kde ALE, AT a S sú nejaké reálne čísla a ALE a AT súčasne sa nerovná nule, definuje priamku v pravouhlom súradnicovom systéme Oxy na rovine a akákoľvek priamka na rovine je daná rovnicou tvaru
, kde ALE, AT a S sú nejaké reálne čísla a ALE a AT súčasne sa nerovná nule, definuje priamku v pravouhlom súradnicovom systéme Oxy na rovine a akákoľvek priamka na rovine je daná rovnicou tvaru ![]() .
.
Rovnica s priamkou , kde a a b volajú sa niektoré reálne čísla iné ako nula rovnica priamky v segmentoch. Tento názov nie je náhodný, pretože ide o absolútne hodnoty čísel a a b rovná dĺžkam segmentov, ktoré priamka odreže na súradnicových osiach Vôl a Oj(segmenty sa počítajú od začiatku).
Rovnica s priamkou , kde X a r sú premenné a k a b sú nejaké reálne čísla, tzv rovnica priamky so sklonom (k- uhlový koeficient)
Kanonická rovnica priamky v rovine v pravouhlom karteziánskom súradnicovom systéme Oxy má formu  , kde a sú nejaké reálne čísla a a zároveň sa nerovnajú nule.
, kde a sú nejaké reálne čísla a a zároveň sa nerovnajú nule.
Je zrejmé, že bodom prechádza priamka, definovaná kanonickou rovnicou priamky. Čísla a , stojace v menovateľoch zlomkov, sú súradnicami smerového vektora tejto čiary. Teda kanonická rovnica priamky v pravouhlom súradnicovom systéme Oxy na rovine zodpovedá priamke prechádzajúcej bodom a majúcej smerový vektor .
Parametrické rovnice priamky na rovine vyzerať ako  , kde a sú nejaké reálne čísla a a zároveň sa nerovnajú nule a je to parameter, ktorý nadobúda akékoľvek reálne hodnoty.
, kde a sú nejaké reálne čísla a a zároveň sa nerovnajú nule a je to parameter, ktorý nadobúda akékoľvek reálne hodnoty.
Parametrické rovnice priamky vytvárajú implicitný vzťah medzi úsečkami a ordinátami bodov priamky pomocou parametra (odtiaľ názov tohto typu rovníc priamok).
Dvojica čísel, ktoré sú vypočítané parametrickými rovnicami priamky pre nejakú reálnu hodnotu parametra, sú súradnicami nejakého bodu na priamke. Napríklad, keď máme  , teda bod so súradnicami leží na priamke.
, teda bod so súradnicami leží na priamke.
Treba poznamenať, že koeficienty a pri parametri v parametrických rovniciach priamky sú súradnicami smerového vektora tejto priamky.
Rovnica priamky prechádzajúcej dvoma bodmi
Nech sú v priestore dané dva body M 1 (x 1, y 1, z 1) a M 2 (x 2, y 2, z 2), potom rovnica priamky prechádzajúcej týmito bodmi:

Ak sa niektorý z menovateľov rovná nule, zodpovedajúci čitateľ by mal byť nastavený na nulu. Rovnica s priamkou napísaná vyššie je v rovine zjednodušená:

ak x 1 ≠ x 2 a x = x 1, ak x 1 = x 2.
Zlomok = k sa nazýva faktor sklonu rovno.
C) výpočet uhla medzi dvoma čiarami
ak sú dané dve čiary y = k 1 x + b 1 , y = k 2 x + b 2 , potom ostrý uhol medzi týmito čiarami bude definovaný ako
 .
.
Dve priamky sú rovnobežné, ak k 1 = k 2 . Dve čiary sú kolmé, ak k 1 = -1/ k 2 .
Veta. Priamky Ax + Vy + C \u003d 0 a A 1 x + B 1 y + C 1 \u003d 0 sú rovnobežné, keď sú koeficienty A 1 \u003d λA, B 1 \u003d λB úmerné. Ak aj С 1 = λС, potom sa čiary zhodujú. Súradnice priesečníka dvoch priamok sa nachádzajú ako riešenie sústavy rovníc týchto priamok.
D) podmienky rovnobežnosti a kolmosti dvoch priamok
Podmienky pre rovnobežnosť dvoch čiar:
a) Ak sú priamky dané rovnicami so sklonom, potom nevyhnutnou a postačujúcou podmienkou ich rovnobežnosti je rovnosť ich sklonov:
k 1 = k 2 .
b) Pre prípad, keď sú priamky dané rovnicami vo všeobecnom tvare (6), je nutnou a postačujúcou podmienkou ich rovnobežnosti, aby koeficienty na zodpovedajúcich súradniciach prúdu v ich rovniciach boli úmerné, t.j.
Podmienky pre kolmosť dvoch čiar:
a) V prípade, keď sú priamky dané rovnicami (4) so sklonom, nevyhnutnou a postačujúcou podmienkou ich kolmosti je, aby ich sklony boli veľkosťou vzájomné a opačného znamienka, t.j.
Túto podmienku je možné zapísať aj do formulára
k 1 k 2 = -1.
b) Ak sú rovnice priamok uvedené vo všeobecnom tvare (6), tak podmienkou ich kolmosti (nutnej a postačujúcej) je splnenie rovnosti
A 1 A 2 + B 1 B 2 = 0.
Funkčný limit
A) limit postupnosti
Pojem limity používal Newton v druhej polovici 17. storočia a matematici 18. storočia ako Euler a Lagrange, ale limitu chápali intuitívne. Prvé presné definície limity postupnosti poskytli Bolzano v roku 1816 a Cauchy v roku 1821.
Číslo sa volá limit číselnej postupnosti, ak je postupnosť nekonečne malá, t.j. všetky jej prvky, počnúc od niektorých, sú menšie ako akékoľvek vopred zvolené kladné číslo.
V prípade, že číselná postupnosť má limitu v tvare reálneho čísla, volá sa zbiehajúce sa na toto číslo. V opačnom prípade sa volá sekvencia divergentný . Ak je navyše neobmedzená, predpokladá sa, že jej limita sa rovná nekonečnu.
Okrem toho, ak všetky prvky neohraničenej postupnosti, počnúc nejakým číslom, majú kladné znamienko, potom hovoríme, že limita takejto postupnosti sa rovná plus nekonečno .
Ak prvky neobmedzenej postupnosti, počnúc od nejakého čísla, majú záporné znamienko, potom hovoria, že limit takejto postupnosti sa rovná mínus nekonečno .
B) limit funkcie
Funkčný limit (limit funkcie) v danom bode, obmedzujúcom pre definičný obor funkcie, je taká hodnota, ku ktorej smeruje hodnota uvažovanej funkcie, keď jej argument smeruje k danému bodu.
Funkčný limit je zovšeobecnením pojmu limita postupnosti: spočiatku sa limita funkcie v bode chápala ako limita postupnosti prvkov rozsahu funkcie, zložená z obrazov bodov postupnosti prvkov. definičného oboru funkcie, konvergujúce k danému bodu (limita, pri ktorej sa uvažuje); ak takáto hranica existuje, potom sa hovorí, že funkcia konverguje k špecifikovanej hodnote; ak takáto limita neexistuje, potom sa hovorí, že funkcia diverguje.
Funkčný limit- jeden zo základných pojmov matematického rozboru. Hodnota sa volá limit (limitná hodnota) funkcie v bode, ak pre akúkoľvek postupnosť bodov konvergujúcich k, ale neobsahujúcich ako jeden z jej prvkov (t. j. v punktovanom susedstve), postupnosť hodnôt funkcie konverguje k .
Hodnota sa volá limit (limitná hodnota) funkcie v bode , ak pre akékoľvek vopred prijaté kladné číslo existuje kladné číslo, ktoré mu zodpovedá tak, že pre všetky argumenty spĺňajúce podmienku je splnená nerovnosť.
C) dve pozoruhodné hranice
· Prvý pozoruhodný limit:
![]()
Dôsledky
· ![]()
· ![]()
· 
· Druhá pozoruhodná hranica:
![]()
Dôsledky
1. ![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]() pre ,
pre ,
6. ![]()
D) nekonečne malé a nekonečne veľké funkcie
Funkcia y=f(x) volal nekonečne malý pri x→a alebo kedy X→∞ ak alebo , t.j. Infinitezimálna funkcia je funkcia, ktorej limita v danom bode je nula.
ak funkcia y=f(x) zastupiteľné pri x→a ako súčet konštantného čísla b a nekonečne malý α(x): f(x)=b+ α(x) potom .
Naopak, ak , potom f(x)=b+α(x), kde a(x) je nekonečne malý x→a.
Dôsledok 1. Ak a , tak .
Dôsledok 2. Ak c= const, teda .
Ak je funkcia f(x) je nekonečne veľký x→a, potom funkcia 1 /f(x) je nekonečne malý x→a.
Ak je funkcia f(x)- nekonečne malý pri x→a(alebo x→∞) a potom nezmizne y= 1/f(x) je nekonečná funkcia. najjednoduchšie vlastnosti nekonečne malých a nekonečne veľkých funkcií možno zapísať pomocou nasledujúcich podmienených vzťahov: A≠ 0
D) zverejnenie neistôt. L'Hopitalovo pravidlo
hlavné typy neistôt: nula delená nulou ( 0 až 0), nekonečno delené nekonečnom, nula krát nekonečno, nekonečno mínus nekonečno, jedna na mocninu nekonečna, nula na mocninu nuly, nekonečno na mocninu nuly.

L'Hopitalovo pravidlo veľmi široko používaný na limitné výpočty keď je neistota tvaru nula delená nulou, nekonečno delené nekonečnom.
Tieto typy neistôt sú redukované na nula krát nekonečno a nekonečno mínus nekonečno.
Ak a ak funkcie f(x) a g(x) sú potom diferencovateľné v okolí bodu 
V prípade, že neistota nezmizne po použití L'Hopitalovho pravidla, môže sa použiť znova.
Výpočet derivátov
A) pravidlo diferenciácie komplexnej funkcie
Nech je komplexná funkcia , kde funkcia je stredný argument. Ukážme si, ako nájsť deriváciu komplexnej funkcie, pričom poznáme deriváciu pre funkciu (označíme ju ) a deriváciu pre funkciu .
Veta 1. Ak má funkcia v bode deriváciu X a funkcia má deriváciu v bode (), potom komplexná funkcia v bode X má derivát a = .
V opačnom prípade sa derivácia komplexnej funkcie rovná súčinu derivácie danej funkcie vzhľadom na medziargument deriváciou medziargumentu.
B) diferenciácia funkcie danej parametricky
Nech je funkcia daná v parametrickom tvare, teda v tvare:
kde funkcie a sú definované a spojité v určitom intervale parametra . Poďme nájsť rozdiely z pravej a ľavej časti každej z rovníc:
Aby sme našli druhú deriváciu, vykonáme nasledujúce transformácie:
![]()
C) pojem logaritmickej derivácie funkcie
Logaritmická derivácia kladnej funkcie sa nazýva derivácia. Pretože potom podľa pravidla diferenciácie komplexnej funkcie získame pre logaritmickú deriváciu nasledujúci vzťah:
 .
.
Pomocou logaritmickej derivácie je vhodné vypočítať obyčajnú deriváciu v prípadoch, keď logaritmus zjednodušuje tvar funkcie.
Podstata takejto diferenciácie je nasledovná: najprv sa nájde logaritmus danej funkcie a až potom sa z neho vypočíta derivácia. Nech je daná nejaká funkcia. Zoberieme logaritmus ľavej a pravej strany tohto výrazu:
A potom, vyjadrením požadovaného derivátu, ako výsledok máme:
D) derivácia inverznej funkcie
Ak y=f(x) a x=g(y) sú párom vzájomne inverzných funkcií a funkcia y=f(x) má deriváciu f"(x), potom derivácia inverznej funkcie g"( x) = 1/f" (x).
Derivácie vzájomne inverzných funkcií sú teda recipročné. Vzorec pre deriváciu inverznej funkcie:
E) derivácia implicitnej funkcie
Ak je funkcia jednej premennej opísaná rovnicou r=f(X), kde premenná r je na ľavej strane, zatiaľ čo pravá strana závisí len od argumentu X, potom hovoríme, že funkcia je daná výslovne. Napríklad sú explicitne definované nasledujúce funkcie:
r= hriech X,r=X 2+2X+5,r=lncos X.
V mnohých úlohách však môže byť funkcia daná implicitne, t.j. vo forme rovnice
F(X,r)=0.
nájsť derivát r′( X) implicitne definovanej funkcie, nie je potrebné ju konvertovať do explicitnej formy. Na to poznať rovnicu F(X,r)=0, urobte nasledovné:
Najprv musíte odlíšiť obe strany rovnice vzhľadom na premennú X, za predpokladu, že r je diferencovateľná funkcia X a použitie pravidla na výpočet derivácie komplexnej funkcie. V tomto prípade bude derivácia nuly (na pravej strane) tiež rovná nule.
Komentujte: Ak je pravá strana nenulová, t.j. implicitná rovnica má tvar
f(X,r)=g(X,r),
potom diferencujeme ľavú a pravú stranu rovnice.
Vyriešte výslednú rovnicu vzhľadom na deriváciu r′( X).
Pojem derivát
A) definícia derivátu
Derivácia funkcie diferenciácia integrácia.
r XX
Definícia derivátu
Zvážte funkciu f(X X 0. Potom funkcia f(X) je diferencovateľné v bode X 0 a ona derivát sa určuje podľa vzorca
f′( X 0)=limA X→0Δ rΔ X=limΔ X→0f(X 0+Δ X)−f(X 0)Δ X.
Derivácia funkcie- jeden zo základných pojmov matematiky a v matematickej analýze zaujíma derivácia spolu s integrálom ústredné miesto. Proces hľadania derivátu je tzv diferenciácia. Volá sa inverzná operácia – obnovenie funkcie zo známej derivácie integrácia.
Derivácia funkcie v určitom bode charakterizuje rýchlosť zmeny funkcie v danom bode. Odhad rýchlosti zmeny možno získať výpočtom pomeru zmeny funkcie Δ r k zodpovedajúcej zmene v argumente Δ X. Pri definícii derivátu sa takýto pomer uvažuje v limite pod podmienkou Δ X→0. Prejdime k prísnejšej formulácii:
Definícia derivátu
Zvážte funkciu f(X), ktorého doména obsahuje nejaký otvorený interval okolo bodu X 0. Potom funkcia f(X) je diferencovateľné v bode X 0 a ona derivát sa určuje podľa vzorca
f′( X 0)=limA X→0Δ rΔ X=limΔ X→0f(X 0+Δ X)−f(X 0)Δ X.
B) geometrický význam derivátu
Derivácia funkcie vypočítaná pre danú hodnotu sa rovná dotyčnici uhla vytvoreného kladným smerom osi a kladným smerom dotyčnice nakreslenej ku grafu tejto funkcie v bode s osou:
Ak má funkcia v bode konečnú deriváciu, potom ju v okolí možno aproximovať lineárnou funkciou
Funkcia sa nazýva dotyčnica k v bode Číslo.
D) tabuľka derivácií najjednoduchších elementárnych funkcií

Def. 1.5.6. Smerové kosínusy vektor a nazvime kosínusy tých uhlov, ktoré tento vektor tvorí so základnými vektormi, resp. i , j , k .
Vektorový smer kosínusy a = (X, pri, z) sa nachádzajú podľa vzorcov:
Súčet štvorcov smerových kosínusov sa rovná jednej:
 Vektorový smer kosínusy a
sú súradnice jej orty: .
Vektorový smer kosínusy a
sú súradnice jej orty: .
Nechajte základné vektory i , j , k čerpané zo spoločného bodu O. Budeme predpokladať, že orty nastavujú kladné smery osí Oh, OU, Oz. zbieranie bodov O (pôvodu) a ortonormálny základ i , j , k volal Kartézsky pravouhlý súradnicový systém v priestore. Nechať byť ALE je ľubovoľný bod v priestore. Vektor a = OA= X i + r j + z k volal vektor polomeru bodov ALE, súradnice tohto vektora ( X, r, z) sa nazývajú aj súradnice bodov ALE(symbol: ALE(X, r, z)). Súradnicové osi Oh, OU, Oz nazývaný aj os úsečka, os ordinát, os aplikovať.
Ak je vektor daný súradnicami jeho počiatočného bodu AT 1 (X 1 , r 1 , z 1) a koncový bod AT 2 (X 2 ,
r 2 , z 2), potom sa súradnice vektora rovnajú rozdielu medzi súradnicami konca a začiatku: (od ![]() ).
).
Kartézske pravouhlé súradnicové systémy v rovine a na priamke sú definované presne rovnakým spôsobom so zodpovedajúcimi kvantitatívnymi (podľa dimenzie) zmenami.
Riešenie typických úloh.
Príklad 1 Nájdite kosínus dĺžky a smeru vektora a = 6i – 2j -3k .
rozhodnutie. Dĺžka vektora: ![]() . Smerové kosínusy:
. Smerové kosínusy: ![]() .
.
Príklad 2 Nájdite vektorové súradnice a , tvoriace rovnaké ostré uhly so súradnicovými osami, ak je dĺžka tohto vektora rovná .
rozhodnutie. Pretože potom dosadením do vzorca (1.6) dostaneme ![]() . Vektor a
zviera ostré uhly so súradnicovými osami, teda orto
. Vektor a
zviera ostré uhly so súradnicovými osami, teda orto ![]() . Preto nájdeme súradnice vektora
. Preto nájdeme súradnice vektora ![]() .
.
Príklad 3 Sú uvedené tri nekoplanárne vektory e 1 = 2i – k , e 2 = 3i + 3j , e 3 = 2i + 3k . Decompose Vector d = i + 5j - 2k základ e 1 , e 2 , e 3 .