ವೆಕ್ಟರ್ ಪ್ರಮಾಣಗಳ ಸೇರ್ಪಡೆಯ ನಿಯಮ. ಫಲಿತಾಂಶದ ಬಲದ ಸೂತ್ರ
ಹಲವಾರು ಶಕ್ತಿಗಳು ಒಂದೇ ಸಮಯದಲ್ಲಿ ಒಂದು ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸಿದಾಗ, ದೇಹವು ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಚಲಿಸಲು ಪ್ರಾರಂಭಿಸುತ್ತದೆ, ಇದು ಪ್ರತಿ ಬಲದ ಪ್ರಭಾವದ ಅಡಿಯಲ್ಲಿ ಪ್ರತ್ಯೇಕವಾಗಿ ಉದ್ಭವಿಸುವ ವೇಗವರ್ಧಕಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವಾಗಿದೆ. ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಗಳಿಗೆ, ಒಂದು ಹಂತಕ್ಕೆ ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ, ವೆಕ್ಟರ್ ಸೇರ್ಪಡೆಯ ನಿಯಮವನ್ನು ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ.
ವ್ಯಾಖ್ಯಾನ 1
ಅದೇ ಸಮಯದಲ್ಲಿ ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವು ಬಲವಾಗಿರುತ್ತದೆ ಪರಿಣಾಮವಾಗಿ, ಇದು ಬಲಗಳ ವೆಕ್ಟರ್ ಸೇರ್ಪಡೆಯ ನಿಯಮದಿಂದ ನಿರ್ಧರಿಸಲ್ಪಡುತ್ತದೆ:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i →.
ಫಲಿತಾಂಶದ ಬಲವು ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಮೊತ್ತದಂತೆಯೇ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ.
ವ್ಯಾಖ್ಯಾನ 22 ಬಲಗಳನ್ನು ಸೇರಿಸಲು, ಬಳಸಿ ನಿಯಮ ಸಮಾನಾಂತರ ಚತುರ್ಭುಜ(ಚಿತ್ರ 1).
ಚಿತ್ರ 1. ಸಮಾನಾಂತರ ಚತುರ್ಭುಜ ನಿಯಮದ ಪ್ರಕಾರ 2 ಬಲಗಳ ಸೇರ್ಪಡೆ
ಕೊಸೈನ್ ಪ್ರಮೇಯವನ್ನು ಬಳಸಿಕೊಂಡು ಫಲಿತಾಂಶದ ಬಲದ ಮಾಡ್ಯುಲಸ್ಗೆ ನಾವು ಸೂತ್ರವನ್ನು ಪಡೆಯುತ್ತೇವೆ:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
ವ್ಯಾಖ್ಯಾನ 3
2 ಕ್ಕಿಂತ ಹೆಚ್ಚು ಪಡೆಗಳನ್ನು ಸೇರಿಸಲು ಅಗತ್ಯವಿದ್ದರೆ, ಬಳಸಿ ಬಹುಭುಜಾಕೃತಿಯ ನಿಯಮ: ಅಂತ್ಯದಿಂದ
1 ನೇ ಬಲವು 2 ನೇ ಬಲಕ್ಕೆ ಸಮಾನವಾದ ಮತ್ತು ಸಮಾನಾಂತರವಾದ ವೆಕ್ಟರ್ ಅನ್ನು ಸೆಳೆಯಲು ಅವಶ್ಯಕವಾಗಿದೆ; 2 ನೇ ಬಲದ ಅಂತ್ಯದಿಂದ, 3 ನೇ ಬಲಕ್ಕೆ ಸಮಾನ ಮತ್ತು ಸಮಾನಾಂತರವಾಗಿ ವೆಕ್ಟರ್ ಅನ್ನು ಸೆಳೆಯುವುದು ಅವಶ್ಯಕ.

ಚಿತ್ರ 2. ಬಹುಭುಜಾಕೃತಿಯ ನಿಯಮದಿಂದ ಬಲಗಳ ಸೇರ್ಪಡೆ
ಅಂತಿಮ ವೆಕ್ಟರ್, ಬಲಗಳ ಅನ್ವಯದ ಬಿಂದುವಿನಿಂದ ಕೊನೆಯ ಬಲದ ಅಂತ್ಯದವರೆಗೆ ಎಳೆಯಲಾಗುತ್ತದೆ, ಫಲಿತಾಂಶದ ಬಲಕ್ಕೆ ಪರಿಮಾಣ ಮತ್ತು ದಿಕ್ಕಿನಲ್ಲಿ ಸಮಾನವಾಗಿರುತ್ತದೆ. 4 ಬಲಗಳಿಂದ ಬಲಗಳ ಫಲಿತಾಂಶವನ್ನು ಕಂಡುಹಿಡಿಯುವ ಉದಾಹರಣೆಯನ್ನು ಚಿತ್ರ 2 ಸ್ಪಷ್ಟವಾಗಿ ವಿವರಿಸುತ್ತದೆ: F 1 → , F 2 → , F 3 → , F 4 → . ಇದಲ್ಲದೆ, ಸಾರೀಕೃತ ವೆಕ್ಟರ್ಗಳು ಒಂದೇ ಸಮತಲದಲ್ಲಿ ಇರಬೇಕಾಗಿಲ್ಲ.
ವಸ್ತು ಬಿಂದುವಿನ ಮೇಲೆ ಬಲದ ಕ್ರಿಯೆಯ ಫಲಿತಾಂಶವು ಅದರ ಮಾಡ್ಯುಲಸ್ ಮತ್ತು ದಿಕ್ಕಿನ ಮೇಲೆ ಮಾತ್ರ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ. ಕಟ್ಟುನಿಟ್ಟಾದ ದೇಹವು ಕೆಲವು ಆಯಾಮಗಳನ್ನು ಹೊಂದಿದೆ. ಆದ್ದರಿಂದ, ಅದೇ ಮಾಡ್ಯೂಲ್ಗಳು ಮತ್ತು ನಿರ್ದೇಶನಗಳೊಂದಿಗೆ ಬಲಗಳು ಅನ್ವಯದ ಬಿಂದುವನ್ನು ಅವಲಂಬಿಸಿ ಕಠಿಣ ದೇಹದ ವಿವಿಧ ಚಲನೆಗಳನ್ನು ಉಂಟುಮಾಡುತ್ತವೆ.
ವ್ಯಾಖ್ಯಾನ 4
ಬಲದ ಸಾಲುಬಲ ವೆಕ್ಟರ್ ಮೂಲಕ ಹಾದುಹೋಗುವ ನೇರ ರೇಖೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.

ಚಿತ್ರ 3. ದೇಹದ ವಿವಿಧ ಬಿಂದುಗಳಿಗೆ ಅನ್ವಯಿಸಲಾದ ಬಲಗಳ ಸೇರ್ಪಡೆ
ಬಲಗಳನ್ನು ದೇಹದ ವಿವಿಧ ಬಿಂದುಗಳಿಗೆ ಅನ್ವಯಿಸಿದರೆ ಮತ್ತು ಪರಸ್ಪರ ಸಮಾನಾಂತರವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸದಿದ್ದರೆ, ಫಲಿತಾಂಶವನ್ನು ಶಕ್ತಿಗಳ ಕ್ರಿಯೆಯ ರೇಖೆಗಳ ಛೇದನದ ಬಿಂದುವಿಗೆ ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ (ಚಿತ್ರ 3 ) ಒಂದು ಬಿಂದುವು ಅದರ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಎಲ್ಲಾ ಬಲಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವು 0 ಆಗಿದ್ದರೆ ಅದು ಸಮತೋಲನದಲ್ಲಿರುತ್ತದೆ: ∑ i = 1 n F i → = 0 → . ಈ ಸಂದರ್ಭದಲ್ಲಿ, 0 ಗೆ ಸಮನಾಗಿರುತ್ತದೆ ಮತ್ತು ಯಾವುದೇ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷದಲ್ಲಿ ಈ ಬಲಗಳ ಪ್ರಕ್ಷೇಪಗಳ ಮೊತ್ತ.
ವ್ಯಾಖ್ಯಾನ 5ಎರಡು ಘಟಕಗಳಾಗಿ ಬಲಗಳ ವಿಭಜನೆ- ಇದು ಒಂದು ಬಲವನ್ನು 2 ರಿಂದ ಬದಲಾಯಿಸುವುದು, ಅದೇ ಹಂತದಲ್ಲಿ ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಈ ಒಂದು ಬಲದಂತೆಯೇ ದೇಹದ ಮೇಲೆ ಅದೇ ಪರಿಣಾಮವನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ. ಬಲಗಳ ವಿಸ್ತರಣೆಯನ್ನು ಸಮಾನಾಂತರ ಚತುರ್ಭುಜ ನಿಯಮದಿಂದ ಸೇರ್ಪಡೆಯಂತೆ ನಡೆಸಲಾಗುತ್ತದೆ.
ಒಂದು ಬಲದ ವಿಸ್ತರಣೆಯ ಸಮಸ್ಯೆ (ಇದರಲ್ಲಿ ಮಾಡ್ಯೂಲ್ ಮತ್ತು ನಿರ್ದೇಶನವನ್ನು ನೀಡಲಾಗಿದೆ) 2 ಕ್ಕೆ, ಒಂದು ಹಂತದಲ್ಲಿ ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಪರಸ್ಪರ ಕೋನದಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ, ಅದು ತಿಳಿದಾಗ ಈ ಕೆಳಗಿನ ಸಂದರ್ಭಗಳಲ್ಲಿ ವಿಶಿಷ್ಟ ಪರಿಹಾರವನ್ನು ಹೊಂದಿದೆ:
- ಪಡೆಗಳ 2 ಘಟಕಗಳ ನಿರ್ದೇಶನಗಳು;
- ಘಟಕ ಶಕ್ತಿಗಳಲ್ಲಿ ಒಂದಾದ ಮಾಡ್ಯೂಲ್ ಮತ್ತು ನಿರ್ದೇಶನ;
- 2 ಘಟಕ ಶಕ್ತಿಗಳ ಮಾಡ್ಯೂಲ್ಗಳು.
ಎಫ್ ಬಲವನ್ನು 2 ಘಟಕಗಳಾಗಿ ವಿಭಜಿಸುವುದು ಅವಶ್ಯಕ, ಅದು ಎಫ್ನೊಂದಿಗೆ ಒಂದೇ ಸಮತಲದಲ್ಲಿದೆ ಮತ್ತು ಎ ಮತ್ತು ಬಿ ರೇಖೆಗಳ ಉದ್ದಕ್ಕೂ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ (ಚಿತ್ರ 4 ) ನಂತರ ಎ ಮತ್ತು ಬಿ ನೇರ ರೇಖೆಗಳಿಗೆ ಸಮಾನಾಂತರವಾಗಿ ವೆಕ್ಟರ್ ಎಫ್ ಅಂತ್ಯದಿಂದ 2 ಸರಳ ರೇಖೆಗಳನ್ನು ಸೆಳೆಯಲು ಸಾಕು. ಸೆಗ್ಮೆಂಟ್ ಎಫ್ ಎ ಮತ್ತು ಸೆಗ್ಮೆಂಟ್ ಎಫ್ ಬಿ ಅಗತ್ಯವಿರುವ ಬಲಗಳನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತದೆ.

ಚಿತ್ರ 4. ದಿಕ್ಕುಗಳಲ್ಲಿ ಬಲ ವೆಕ್ಟರ್ನ ವಿಭಜನೆ
ಉದಾಹರಣೆ 2
ಈ ಸಮಸ್ಯೆಯ ಎರಡನೇ ಆವೃತ್ತಿಯು ನೀಡಿದ ಬಲ ವೆಕ್ಟರ್ ಮತ್ತು 2 ನೇ ಪ್ರೊಜೆಕ್ಷನ್ (ಚಿತ್ರ 5 ಎ) ಪ್ರಕಾರ ಫೋರ್ಸ್ ವೆಕ್ಟರ್ನ ಪ್ರಕ್ಷೇಪಗಳಲ್ಲಿ ಒಂದನ್ನು ಕಂಡುಹಿಡಿಯುವುದು.

ಚಿತ್ರ 5. ಕೊಟ್ಟಿರುವ ವೆಕ್ಟರ್ಗಳಿಂದ ಫೋರ್ಸ್ ವೆಕ್ಟರ್ನ ಪ್ರೊಜೆಕ್ಷನ್ ಅನ್ನು ಕಂಡುಹಿಡಿಯುವುದು
ಸಮಸ್ಯೆಯ ಎರಡನೇ ಆವೃತ್ತಿಯಲ್ಲಿ, ಪ್ಲಾನಿಮೆಟ್ರಿಯಲ್ಲಿರುವಂತೆ ಕರ್ಣೀಯ ಮತ್ತು ಬದಿಗಳಲ್ಲಿ ಒಂದು ಸಮಾನಾಂತರ ಚತುರ್ಭುಜವನ್ನು ನಿರ್ಮಿಸುವುದು ಅವಶ್ಯಕ. ಚಿತ್ರ 5 ಬಿ ಅಂತಹ ಸಮಾನಾಂತರ ಚತುರ್ಭುಜವನ್ನು ತೋರಿಸುತ್ತದೆ ಮತ್ತು ಅಪೇಕ್ಷಿತ ಘಟಕ ಎಫ್ 2 → ಫೋರ್ಸ್ ಎಫ್ → ಅನ್ನು ಸೂಚಿಸಲಾಗುತ್ತದೆ.
ಆದ್ದರಿಂದ, 2 ನೇ ಪರಿಹಾರ ವಿಧಾನ: ಬಲಕ್ಕೆ ಸಮಾನವಾದ ಬಲವನ್ನು ಸೇರಿಸೋಣ - ಎಫ್ 1 → (ಚಿತ್ರ 5 ಸಿ). ಪರಿಣಾಮವಾಗಿ, ನಾವು ಬಯಸಿದ ಬಲವನ್ನು ಪಡೆಯುತ್ತೇವೆ ಎಫ್ → .
ಉದಾಹರಣೆ 3
ಮೂರು ಬಲಗಳು F 1 → = 1 N; ಎಫ್ 2 → = 2 ಎನ್; F 3 → \u003d 3 N ಅನ್ನು ಒಂದು ಬಿಂದುವಿಗೆ ಜೋಡಿಸಲಾಗಿದೆ, ಒಂದೇ ಸಮತಲದಲ್ಲಿದೆ (ಚಿತ್ರ 6 a) ಮತ್ತು ಸಮತಲ α \u003d 0 ° ನೊಂದಿಗೆ ಕೋನಗಳನ್ನು ಮಾಡಿ; β = 60°; ಕ್ರಮವಾಗಿ γ = 30°. ಫಲಿತಾಂಶದ ಬಲವನ್ನು ಕಂಡುಹಿಡಿಯುವುದು ಅವಶ್ಯಕ.
ನಿರ್ಧಾರ

ಚಿತ್ರ 6. ಕೊಟ್ಟಿರುವ ವಾಹಕಗಳಿಂದ ಫಲಿತಾಂಶದ ಬಲವನ್ನು ಕಂಡುಹಿಡಿಯುವುದು
О Х ಅಕ್ಷವು F 1 → ಬಲವನ್ನು ನಿರ್ದೇಶಿಸುವ ಸಮತಲದೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುವ ರೀತಿಯಲ್ಲಿ ಪರಸ್ಪರ ಲಂಬವಾದ ಅಕ್ಷಗಳನ್ನು О Х ಮತ್ತು O Y ಅನ್ನು ಸೆಳೆಯೋಣ. ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳ ಮೇಲೆ ಈ ಶಕ್ತಿಗಳ ಪ್ರಕ್ಷೇಪಣವನ್ನು ಮಾಡೋಣ (ಚಿತ್ರ 6 ಬಿ). F 2 y ಮತ್ತು F 2 x ಪ್ರಕ್ಷೇಪಣಗಳು ಋಣಾತ್ಮಕವಾಗಿವೆ. ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷ ОХ ಮೇಲಿನ ಬಲಗಳ ಪ್ರಕ್ಷೇಪಗಳ ಮೊತ್ತವು ಫಲಿತಾಂಶದ ಈ ಅಕ್ಷದ ಪ್ರಕ್ಷೇಪಣಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ: F 1 + F 2 cos β - F 3 cos γ \u003d F x \u003d 4 - 3 3 2 ≈ - 0 , 6 ಎನ್.
ಅಂತೆಯೇ, O Y ಅಕ್ಷದ ಮೇಲಿನ ಪ್ರಕ್ಷೇಪಗಳಿಗೆ: - F 2 sin β + F 3 sin γ \u003d F y \u003d 3 - 2 3 2 ≈ - 0, 2 N.
ಫಲಿತಾಂಶದ ಮಾಡ್ಯುಲಸ್ ಅನ್ನು ಪೈಥಾಗರಿಯನ್ ಪ್ರಮೇಯವನ್ನು ಬಳಸಿಕೊಂಡು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ:
F \u003d F x 2 + F y 2 \u003d 0. 36 + 0. 04 ≈ 0. 64 N.
ಫಲಿತಾಂಶ ಮತ್ತು ಅಕ್ಷದ ನಡುವಿನ ಕೋನವನ್ನು ಬಳಸಿಕೊಂಡು ಫಲಿತಾಂಶದ ದಿಕ್ಕನ್ನು ನಾವು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ (ಚಿತ್ರ 6 ಸಿ):
t g φ = F y F x = 3 - 2 3 4 - 3 3 ≈ 0, 4.
ಉದಾಹರಣೆ 4
ಫೋರ್ಸ್ F = 1 kN ಅನ್ನು ಬ್ರಾಕೆಟ್ನ ಬಿ ಪಾಯಿಂಟ್ನಲ್ಲಿ ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಲಂಬವಾಗಿ ಕೆಳಕ್ಕೆ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ (ಚಿತ್ರ 7 ಎ). ಬ್ರಾಕೆಟ್ ರಾಡ್ಗಳ ದಿಕ್ಕುಗಳಲ್ಲಿ ಈ ಬಲದ ಘಟಕಗಳನ್ನು ಕಂಡುಹಿಡಿಯುವುದು ಅವಶ್ಯಕ. ಅಗತ್ಯವಿರುವ ಎಲ್ಲಾ ಡೇಟಾವನ್ನು ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಲಾಗಿದೆ.
ನಿರ್ಧಾರ

ಚಿತ್ರ 7. ಬ್ರಾಕೆಟ್ ರಾಡ್ಗಳ ದಿಕ್ಕುಗಳಲ್ಲಿ ಎಫ್ ಬಲದ ಘಟಕಗಳನ್ನು ಕಂಡುಹಿಡಿಯುವುದು
ನೀಡಿದ:
ಎಫ್ = 1 ಕೆ ಎನ್ = 1000 ಎನ್
A ಮತ್ತು C ಬಿಂದುಗಳಲ್ಲಿ ರಾಡ್ಗಳನ್ನು ಗೋಡೆಗೆ ಬೋಲ್ಟ್ ಮಾಡಲಿ. ಚಿತ್ರ 7 b, A B ಮತ್ತು B C ದಿಕ್ಕುಗಳ ಉದ್ದಕ್ಕೂ ಘಟಕಗಳಾಗಿ F → ಬಲದ ವಿಭಜನೆಯನ್ನು ತೋರಿಸುತ್ತದೆ. ಇದರಿಂದ ಅದು ಸ್ಪಷ್ಟವಾಗುತ್ತದೆ
F 1 → = F t g β ≈ 577 N;
F 2 → = F cos β ≈ 1155 N.
ಉತ್ತರ:ಎಫ್ 1 → = 557 ಎನ್; ಎಫ್ 2 → = 1155 ಎನ್.
ಪಠ್ಯದಲ್ಲಿ ನೀವು ತಪ್ಪನ್ನು ಗಮನಿಸಿದರೆ, ದಯವಿಟ್ಟು ಅದನ್ನು ಹೈಲೈಟ್ ಮಾಡಿ ಮತ್ತು Ctrl+Enter ಒತ್ತಿರಿ
ಇದು ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವಾಗಿದೆ.
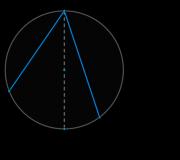
ಸೈಕ್ಲಿಸ್ಟ್ ತಿರುವಿನ ಕಡೆಗೆ ವಾಲುತ್ತಾನೆ. ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲ ಮತ್ತು ನೆಲದಿಂದ ಬೆಂಬಲದ ಪ್ರತಿಕ್ರಿಯೆ ಬಲವು ವೃತ್ತದಲ್ಲಿ ಚಲನೆಗೆ ಅಗತ್ಯವಾದ ಕೇಂದ್ರಾಭಿಮುಖ ವೇಗವರ್ಧಕವನ್ನು ನೀಡುವ ಫಲಿತಾಂಶದ ಬಲವನ್ನು ನೀಡುತ್ತದೆ.
ನ್ಯೂಟನ್ರ ಎರಡನೇ ನಿಯಮದೊಂದಿಗೆ ಸಂಬಂಧ
ನ್ಯೂಟನ್ರನ ನಿಯಮವನ್ನು ನೆನಪಿಸಿಕೊಳ್ಳೋಣ: 

ಒಂದು ಬಲವನ್ನು ಇನ್ನೊಂದರಿಂದ ಸರಿದೂಗಿಸಿದಾಗ ಫಲಿತಾಂಶದ ಬಲವು ಶೂನ್ಯಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ, ಅದೇ ಬಲ, ಆದರೆ ದಿಕ್ಕಿನಲ್ಲಿ ವಿರುದ್ಧವಾಗಿರುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ದೇಹವು ವಿಶ್ರಾಂತಿ ಪಡೆಯುತ್ತದೆ ಅಥವಾ ಏಕರೂಪವಾಗಿ ಚಲಿಸುತ್ತದೆ.
ಫಲಿತಾಂಶದ ಬಲವು ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿಲ್ಲದಿದ್ದರೆ, ದೇಹವು ಏಕರೂಪದ ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಚಲಿಸುತ್ತದೆ. ವಾಸ್ತವವಾಗಿ, ಈ ಶಕ್ತಿಯೇ ಅಸಮ ಚಲನೆಗೆ ಕಾರಣವಾಗಿದೆ. ಫಲಿತಾಂಶದ ಬಲದ ನಿರ್ದೇಶನ ಯಾವಾಗಲೂವೇಗವರ್ಧಕ ವೆಕ್ಟರ್ನೊಂದಿಗೆ ದಿಕ್ಕಿನಲ್ಲಿ ಸೇರಿಕೊಳ್ಳುತ್ತದೆ.
ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಗಳನ್ನು ಚಿತ್ರಿಸಲು ಅಗತ್ಯವಾದಾಗ, ದೇಹವು ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತವಾಗಿ ಚಲಿಸುವಾಗ, ವೇಗವರ್ಧನೆಯ ದಿಕ್ಕಿನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಯು ವಿರುದ್ಧಕ್ಕಿಂತ ಉದ್ದವಾಗಿದೆ ಎಂದರ್ಥ. ದೇಹವು ಏಕರೂಪವಾಗಿ ಚಲಿಸಿದರೆ ಅಥವಾ ವಿಶ್ರಾಂತಿಯಲ್ಲಿದ್ದರೆ, ಬಲ ವಾಹಕಗಳ ಉದ್ದವು ಒಂದೇ ಆಗಿರುತ್ತದೆ.
ಫಲಿತಾಂಶದ ಬಲವನ್ನು ಕಂಡುಹಿಡಿಯುವುದು
ಫಲಿತಾಂಶದ ಬಲವನ್ನು ಕಂಡುಹಿಡಿಯಲು, ಇದು ಅವಶ್ಯಕವಾಗಿದೆ: ಮೊದಲನೆಯದಾಗಿ, ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಎಲ್ಲಾ ಶಕ್ತಿಗಳನ್ನು ಸರಿಯಾಗಿ ಗೊತ್ತುಪಡಿಸುವುದು; ನಂತರ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳನ್ನು ಎಳೆಯಿರಿ, ಅವುಗಳ ದಿಕ್ಕುಗಳನ್ನು ಆರಿಸಿ; ಮೂರನೇ ಹಂತದಲ್ಲಿ, ಅಕ್ಷಗಳ ಮೇಲೆ ವಾಹಕಗಳ ಪ್ರಕ್ಷೇಪಣಗಳನ್ನು ನಿರ್ಧರಿಸುವುದು ಅವಶ್ಯಕ; ಸಮೀಕರಣಗಳನ್ನು ಬರೆಯಿರಿ. ಸಂಕ್ಷಿಪ್ತವಾಗಿ: 1) ಪಡೆಗಳನ್ನು ಗೊತ್ತುಪಡಿಸಿ; 2) ಅಕ್ಷಗಳು, ಅವುಗಳ ನಿರ್ದೇಶನಗಳನ್ನು ಆಯ್ಕೆ ಮಾಡಿ; 3) ಅಕ್ಷದ ಮೇಲೆ ಬಲಗಳ ಪ್ರಕ್ಷೇಪಣಗಳನ್ನು ಕಂಡುಹಿಡಿಯಿರಿ; 4) ಸಮೀಕರಣಗಳನ್ನು ಬರೆಯಿರಿ.
ಸಮೀಕರಣಗಳನ್ನು ಬರೆಯುವುದು ಹೇಗೆ? ದೇಹವು ಕೆಲವು ದಿಕ್ಕಿನಲ್ಲಿ ಏಕರೂಪವಾಗಿ ಚಲಿಸಿದರೆ ಅಥವಾ ವಿಶ್ರಾಂತಿಯಲ್ಲಿದ್ದರೆ, ನಂತರ ಬಲ ಪ್ರಕ್ಷೇಪಗಳ ಬೀಜಗಣಿತದ ಮೊತ್ತವು (ಚಿಹ್ನೆಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಂಡು) ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಒಂದು ದೇಹವು ಒಂದು ನಿರ್ದಿಷ್ಟ ದಿಕ್ಕಿನಲ್ಲಿ ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತವಾಗಿ ಚಲಿಸಿದರೆ, ನ್ಯೂಟನ್ನ ಎರಡನೇ ನಿಯಮದ ಪ್ರಕಾರ ಶಕ್ತಿಗಳ ಪ್ರಕ್ಷೇಪಗಳ ಬೀಜಗಣಿತದ ಮೊತ್ತವು ದ್ರವ್ಯರಾಶಿ ಮತ್ತು ವೇಗವರ್ಧನೆಯ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಉದಾಹರಣೆಗಳು
ಸಮತಲ ಮೇಲ್ಮೈಯಲ್ಲಿ ಏಕರೂಪವಾಗಿ ಚಲಿಸುವ ದೇಹವು ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲ, ಬೆಂಬಲದ ಪ್ರತಿಕ್ರಿಯೆಯ ಬಲ, ಘರ್ಷಣೆಯ ಬಲ ಮತ್ತು ದೇಹವು ಚಲಿಸುವ ಬಲದಿಂದ ಪ್ರಭಾವಿತವಾಗಿರುತ್ತದೆ.
ನಾವು ಬಲಗಳನ್ನು ಸೂಚಿಸುತ್ತೇವೆ, ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳನ್ನು ಆಯ್ಕೆ ಮಾಡುತ್ತೇವೆ

ಪ್ರಕ್ಷೇಪಗಳನ್ನು ಕಂಡುಹಿಡಿಯೋಣ

ಸಮೀಕರಣಗಳನ್ನು ಬರೆಯುವುದು

ಲಂಬವಾದ ಗೋಡೆಯ ವಿರುದ್ಧ ಒತ್ತಿದರೆ ದೇಹವು ಏಕರೂಪದ ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಕೆಳಕ್ಕೆ ಚಲಿಸುತ್ತದೆ. ದೇಹವು ಗುರುತ್ವಾಕರ್ಷಣೆ, ಘರ್ಷಣೆ, ಬೆಂಬಲ ಪ್ರತಿಕ್ರಿಯೆ ಮತ್ತು ದೇಹವನ್ನು ಒತ್ತುವ ಬಲದಿಂದ ಪ್ರಭಾವಿತವಾಗಿರುತ್ತದೆ. ವೇಗವರ್ಧಕ ವೆಕ್ಟರ್ ಅನ್ನು ಲಂಬವಾಗಿ ಕೆಳಕ್ಕೆ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ. ಪರಿಣಾಮವಾಗಿ ಬಲವನ್ನು ಲಂಬವಾಗಿ ಕೆಳಕ್ಕೆ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ.


ದೇಹವು ಬೆಣೆಯಾಕಾರದ ಉದ್ದಕ್ಕೂ ಏಕರೂಪವಾಗಿ ಚಲಿಸುತ್ತದೆ, ಅದರ ಇಳಿಜಾರು ಆಲ್ಫಾ ಆಗಿದೆ. ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಬಲ, ಬೆಂಬಲದ ಪ್ರತಿಕ್ರಿಯೆ ಶಕ್ತಿ ಮತ್ತು ಘರ್ಷಣೆಯ ಬಲವು ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ.


ನೆನಪಿಡುವ ಮುಖ್ಯ ವಿಷಯ
1) ದೇಹವು ವಿಶ್ರಾಂತಿಯಲ್ಲಿದ್ದರೆ ಅಥವಾ ಏಕರೂಪವಾಗಿ ಚಲಿಸಿದರೆ, ಫಲಿತಾಂಶದ ಬಲವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ ಮತ್ತು ವೇಗವರ್ಧನೆಯು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ;
2) ದೇಹವು ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತವಾಗಿ ಚಲಿಸಿದರೆ, ಪರಿಣಾಮವಾಗಿ ಬಲವು ಶೂನ್ಯವಾಗಿರುವುದಿಲ್ಲ;
3) ಫಲಿತಾಂಶದ ಬಲ ವೆಕ್ಟರ್ನ ದಿಕ್ಕು ಯಾವಾಗಲೂ ವೇಗವರ್ಧನೆಯ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ;
4) ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಗಳ ಪ್ರಕ್ಷೇಪಗಳ ಸಮೀಕರಣಗಳನ್ನು ಬರೆಯಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ
ಬ್ಲಾಕ್ - ಯಾಂತ್ರಿಕ ಸಾಧನ, ಅದರ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗುವ ಚಕ್ರ. ಬ್ಲಾಕ್ಗಳು ಆಗಿರಬಹುದು ಮೊಬೈಲ್ಮತ್ತು ಚಲನರಹಿತ.
ಸ್ಥಿರ ಬ್ಲಾಕ್ಬಲದ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸಲು ಮಾತ್ರ ಬಳಸಲಾಗುತ್ತದೆ.

ವಿಸ್ತರಿಸಲಾಗದ ಥ್ರೆಡ್ನಿಂದ ಸಂಪರ್ಕಿಸಲಾದ ದೇಹಗಳು ಒಂದೇ ರೀತಿಯ ವೇಗವರ್ಧಕಗಳನ್ನು ಹೊಂದಿವೆ.
ಚಲಿಸಬಲ್ಲ ಬ್ಲಾಕ್ಅನ್ವಯಿಸಲಾದ ಪ್ರಯತ್ನದ ಪ್ರಮಾಣವನ್ನು ಬದಲಾಯಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ. ಬ್ಲಾಕ್ ಸುತ್ತಲೂ ಸುತ್ತುವ ಹಗ್ಗದ ತುದಿಗಳು ಹಾರಿಜಾನ್ನೊಂದಿಗೆ ಸಮಾನ ಕೋನಗಳನ್ನು ಮಾಡಿದರೆ, ಭಾರವನ್ನು ಎತ್ತಲು ಲೋಡ್ನ ತೂಕದ ಅರ್ಧದಷ್ಟು ಬಲವು ಅಗತ್ಯವಾಗಿರುತ್ತದೆ. ಲೋಡ್ನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲವು ಅದರ ತೂಕಕ್ಕೆ ಸಂಬಂಧಿಸಿದೆ, ಏಕೆಂದರೆ ಬ್ಲಾಕ್ನ ತ್ರಿಜ್ಯವು ಹಗ್ಗದ ಸುತ್ತಲೂ ಸುತ್ತುವ ಚಾಪದ ಸ್ವರಮೇಳಕ್ಕೆ ಸಂಬಂಧಿಸಿದೆ.

ದೇಹದ A ಯ ವೇಗವರ್ಧನೆಯು ದೇಹದ B ಯ ಅರ್ಧದಷ್ಟು.
ವಾಸ್ತವವಾಗಿ, ಪ್ರತಿ ಬ್ಲಾಕ್ ಆಗಿದೆ ಲಿವರ್ ತೋಳು, ಸ್ಥಿರ ಬ್ಲಾಕ್ನ ಸಂದರ್ಭದಲ್ಲಿ - ಸಮಾನ ತೋಳುಗಳು, ಚಲಿಸಬಲ್ಲ ಬ್ಲಾಕ್ನ ಸಂದರ್ಭದಲ್ಲಿ - 1 ರಿಂದ 2 ರ ಭುಜದ ಅನುಪಾತದೊಂದಿಗೆ. ಯಾವುದೇ ಇತರ ಲಿವರ್ನಂತೆ, ನಿಯಮವು ಬ್ಲಾಕ್ಗೆ ನಿಜವಾಗಿದೆ: ನಾವು ಎಷ್ಟು ಬಾರಿ ಪ್ರಯತ್ನದಲ್ಲಿ ಗೆಲ್ಲುತ್ತೇವೆ, ಎಷ್ಟು ಬಾರಿ ದೂರದಲ್ಲಿ ಸೋಲುತ್ತೇವೆ
ಹಲವಾರು ಚಲಿಸಬಲ್ಲ ಮತ್ತು ಸ್ಥಿರ ಬ್ಲಾಕ್ಗಳ ಸಂಯೋಜನೆಯನ್ನು ಒಳಗೊಂಡಿರುವ ವ್ಯವಸ್ಥೆಯನ್ನು ಸಹ ಬಳಸಲಾಗುತ್ತದೆ. ಅಂತಹ ವ್ಯವಸ್ಥೆಯನ್ನು ಪಾಲಿಸ್ಪಾಸ್ಟ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.

ಒಂದು ವೃತ್ತ.
ಸಿ) ಪ್ಯಾರಾಬೋಲಾ
ಡಿ) ಪಥವು ಯಾವುದಾದರೂ ಆಗಿರಬಹುದು.
ಇ) ನೇರ.
2. ದೇಹಗಳನ್ನು ಗಾಳಿಯಿಲ್ಲದ ಜಾಗದಿಂದ ಬೇರ್ಪಡಿಸಿದರೆ, ನಂತರ ಅವುಗಳ ನಡುವೆ ಶಾಖ ವರ್ಗಾವಣೆ ಸಾಧ್ಯ
ಎ) ವಹನ ಮತ್ತು ಸಂವಹನ.
ಬಿ) ವಿಕಿರಣ
ಸಿ) ಉಷ್ಣ ವಾಹಕತೆ
ಡಿ) ಸಂವಹನ ಮತ್ತು ವಿಕಿರಣ.
ಇ) ಸಂವಹನ.
3. ಎಲೆಕ್ಟ್ರಾನ್ ಮತ್ತು ನ್ಯೂಟ್ರಾನ್ ವಿದ್ಯುದಾವೇಶಗಳನ್ನು ಹೊಂದಿವೆ
ಎ) ಎಲೆಕ್ಟ್ರಾನ್ - ಋಣಾತ್ಮಕ, ನ್ಯೂಟ್ರಾನ್ - ಧನಾತ್ಮಕ.
ಬಿ) ಎಲೆಕ್ಟ್ರಾನ್ ಮತ್ತು ನ್ಯೂಟ್ರಾನ್ - ಋಣಾತ್ಮಕ.
ಸಿ) ಎಲೆಕ್ಟ್ರಾನ್ - ಧನಾತ್ಮಕ, ನ್ಯೂಟ್ರಾನ್ - ಋಣಾತ್ಮಕ.
ಡಿ) ಎಲೆಕ್ಟ್ರಾನ್ ಮತ್ತು ನ್ಯೂಟ್ರಾನ್ - ಧನಾತ್ಮಕ.
ಇ) ಎಲೆಕ್ಟ್ರಾನ್ ಋಣಾತ್ಮಕವಾಗಿದೆ, ನ್ಯೂಟ್ರಾನ್ ಯಾವುದೇ ಚಾರ್ಜ್ ಹೊಂದಿಲ್ಲ.
4. 4V ನಲ್ಲಿ ರೇಟ್ ಮಾಡಲಾದ ಮತ್ತು 3 ನಿಮಿಷಗಳ ಕಾಲ ಲೈಟ್ ಬಲ್ಬ್ನೊಂದಿಗೆ 250 J ಗೆ ಸಮಾನವಾದ ಕೆಲಸವನ್ನು ನಿರ್ವಹಿಸಲು ಅಗತ್ಯವಿರುವ ಪ್ರಸ್ತುತ ಸಾಮರ್ಥ್ಯವು ಸಮಾನವಾಗಿರುತ್ತದೆ
5. ಸ್ವಾಭಾವಿಕ ರೂಪಾಂತರದ ಪರಿಣಾಮವಾಗಿ, ಮುಂದಿನ ವಿಕಿರಣಶೀಲ ಕೊಳೆಯುವಿಕೆಯ ಪರಿಣಾಮವಾಗಿ ಹೀಲಿಯಂ ಪರಮಾಣುವಿನ ನ್ಯೂಕ್ಲಿಯಸ್ ಪರಮಾಣು ನ್ಯೂಕ್ಲಿಯಸ್ನಿಂದ ಹಾರಿಹೋಯಿತು
ಎ) ಗಾಮಾ ವಿಕಿರಣ
ಬಿ) ಎರಡು-ಪ್ರೋಟಾನ್ ಕೊಳೆತ.
ಸಿ) ಆಲ್ಫಾ ಕೊಳೆತ
ಡಿ) ಪ್ರೋಟಾನ್ ಕೊಳೆತ
ಇ) ಬೀಟಾ ಕೊಳೆತ
6. ಕರ್ಕಾಟಕ ರಾಶಿಯಂತೆಯೇ ಅದೇ ಚಿಹ್ನೆಯಿಂದ ಸೂಚಿಸಲಾದ ಆಕಾಶ ಗೋಳದ ಬಿಂದುವು ಬಿಂದುವಾಗಿದೆ
ಎ) ಗ್ರಹಗಳ ಮೆರವಣಿಗೆ
ಬಿ) ವಸಂತ ವಿಷುವತ್ ಸಂಕ್ರಾಂತಿ
ಸಿ) ಶರತ್ಕಾಲದ ವಿಷುವತ್ ಸಂಕ್ರಾಂತಿ
ಡಿ) ಬೇಸಿಗೆಯ ಅಯನ ಸಂಕ್ರಾಂತಿ
ಇ) ಚಳಿಗಾಲದ ಅಯನ ಸಂಕ್ರಾಂತಿ
7. ಟ್ರಕ್ನ ಚಲನೆಯನ್ನು x1= - 270 + 12t ಎಂಬ ಸಮೀಕರಣಗಳಿಂದ ವಿವರಿಸಲಾಗಿದೆ ಮತ್ತು ಅದೇ ಹೆದ್ದಾರಿಯ ಬದಿಯಲ್ಲಿ ಪಾದಚಾರಿಗಳ ಚಲನೆಯನ್ನು x2= - 1.5t ಎಂಬ ಸಮೀಕರಣದಿಂದ ವಿವರಿಸಲಾಗಿದೆ. ಸಭೆಯ ಸಮಯ
8. ದೇಹವನ್ನು 9 ಮೀ/ಸೆ ವೇಗದಲ್ಲಿ ಮೇಲಕ್ಕೆ ಎಸೆದರೆ, ಅದು ಗರಿಷ್ಠ ಎತ್ತರವನ್ನು ತಲುಪುತ್ತದೆ (g = 10 m/s2)
9. 4 N ಗೆ ಸಮಾನವಾದ ಸ್ಥಿರ ಬಲದ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ, 8 ಕೆಜಿ ದ್ರವ್ಯರಾಶಿಯೊಂದಿಗೆ ದೇಹವು ಚಲಿಸುತ್ತದೆ
ಎ) 0.5 ಮೀ/ಸೆ2 ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತವಾಗಿದೆ
ಬಿ) 2 m/s2 ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತವಾಗಿದೆ
ಸಿ) 32 ಮೀ/ಸೆ2 ವೇಗವರ್ಧನೆಯೊಂದಿಗೆ ಏಕರೂಪವಾಗಿ ವೇಗವರ್ಧಿತವಾಗಿದೆ
ಡಿ) 0.5 ಮೀ / ಸೆ ವೇಗದಲ್ಲಿ ಸಮವಾಗಿ
ಇ) 2 ಮೀ / ಸೆ ವೇಗದಲ್ಲಿ ಸಮವಾಗಿ
10. ಟ್ರಾಲಿಬಸ್ ಎಳೆತದ ಮೋಟರ್ನ ಶಕ್ತಿಯು 86 kW ಆಗಿದೆ. ಎಂಜಿನ್ 2 ಗಂಟೆಗಳಲ್ಲಿ ಮಾಡಬಹುದಾದ ಕೆಲಸ
ಎ) 619200 ಕೆಜೆ.
ಸಿ) 14400 ಕೆಜೆ
ಇ) 17200 ಕೆಜೆ.
11. ವಿರೂಪದಲ್ಲಿ 4 ಪಟ್ಟು ಹೆಚ್ಚಳದೊಂದಿಗೆ ಸ್ಥಿತಿಸ್ಥಾಪಕವಾಗಿ ವಿರೂಪಗೊಂಡ ದೇಹದ ಸಂಭಾವ್ಯ ಶಕ್ತಿ
ಎ) ಬದಲಾಗುವುದಿಲ್ಲ.
ಬಿ) 4 ಪಟ್ಟು ಕಡಿಮೆಯಾಗುತ್ತದೆ.
ಸಿ) 16 ಪಟ್ಟು ಹೆಚ್ಚಾಗುತ್ತದೆ.
ಡಿ) 4 ಪಟ್ಟು ಹೆಚ್ಚಾಗುತ್ತದೆ.
ಇ) 16 ಪಟ್ಟು ಕಡಿಮೆಯಾಗುತ್ತದೆ.
12. m1 = 5 g ಮತ್ತು m2 = 25 g ದ್ರವ್ಯರಾಶಿಯ ಚೆಂಡುಗಳು υ1 = 8 m/s ಮತ್ತು υ2 = 4 m/s ವೇಗದೊಂದಿಗೆ ಪರಸ್ಪರ ಚಲಿಸುತ್ತವೆ. ಅಸ್ಥಿರ ಪ್ರಭಾವದ ನಂತರ, ಚೆಂಡಿನ m1 ವೇಗವು (ನಿರ್ದೇಶನ ಅಕ್ಷದ ದಿಕ್ಕು ಮೊದಲ ದೇಹದ ಚಲನೆಯ ದಿಕ್ಕಿನೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತದೆ)
13. ಯಾಂತ್ರಿಕ ಕಂಪನಗಳೊಂದಿಗೆ
ಎ) ಸಂಭಾವ್ಯ ಶಕ್ತಿ ಮಾತ್ರ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ
ಬಿ) ಸಂಭಾವ್ಯ ಶಕ್ತಿ ಮತ್ತು ಚಲನ ಶಕ್ತಿ ಎರಡೂ ಸ್ಥಿರವಾಗಿರುತ್ತವೆ
ಸಿ) ಚಲನ ಶಕ್ತಿ ಮಾತ್ರ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ
ಡಿ) ಒಟ್ಟು ಯಾಂತ್ರಿಕ ಶಕ್ತಿ ಮಾತ್ರ ಸ್ಥಿರವಾಗಿರುತ್ತದೆ
ಇ) ಅವಧಿಯ ಮೊದಲಾರ್ಧದಲ್ಲಿ ಶಕ್ತಿಯು ಸ್ಥಿರವಾಗಿರುತ್ತದೆ
14. ತವರವು ಕರಗುವ ಹಂತದಲ್ಲಿದ್ದರೆ, 4 ಕೆಜಿ ತಲೆಯನ್ನು ಕರಗಿಸಲು (J / kg) ಸಮಾನವಾದ ಶಾಖದ ಅಗತ್ಯವಿರುತ್ತದೆ
15. 0.2 N / C ಶಕ್ತಿಯೊಂದಿಗೆ ವಿದ್ಯುತ್ ಕ್ಷೇತ್ರವು 2 C ಚಾರ್ಜ್ನಲ್ಲಿ ಬಲದೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ
16. ಆವರ್ತನ ಹೆಚ್ಚಾದಂತೆ ವಿದ್ಯುತ್ಕಾಂತೀಯ ಅಲೆಗಳ ಸರಿಯಾದ ಅನುಕ್ರಮವನ್ನು ಹೊಂದಿಸಿ
1) ರೇಡಿಯೋ ತರಂಗಗಳು, 2) ಗೋಚರ ಬೆಳಕು, 3) ಕ್ಷ-ಕಿರಣಗಳು, 4) ಅತಿಗೆಂಪು ವಿಕಿರಣ, 5) ನೇರಳಾತೀತ ವಿಕಿರಣ
ಎ) 4, 1, 5, 2, 3
ಬಿ) 5, 4, 1, 2, 3
ಸಿ) 3, 4, 5, 1, 2
ಡಿ) 2, 1, 5, 3, 4
ಇ) 1, 4, 2, 5, 3
17. ಕತ್ತರಿಗಳ ಹಿಡಿಕೆಗಳಿಗೆ 40 N ಬಲವನ್ನು ಅನ್ವಯಿಸುವ ಮೂಲಕ ವಿದ್ಯಾರ್ಥಿಯು ತವರವನ್ನು ಕತ್ತರಿಸುತ್ತಾನೆ. ತವರವು 2.5 ಸೆಂ.ಮೀ. ತವರವನ್ನು ಕತ್ತರಿಸಲು ಬೇಕಾದ ಬಲ
18. ಹೈಡ್ರಾಲಿಕ್ ಪ್ರೆಸ್ನ ಸಣ್ಣ ಪಿಸ್ಟನ್ನ ಪ್ರದೇಶವು 4 cm2 ಮತ್ತು ದೊಡ್ಡ ಪಿಸ್ಟನ್ನ ಪ್ರದೇಶವು 0.01 m2 ಆಗಿದೆ. ದೊಡ್ಡ ಪಿಸ್ಟನ್ ಮೇಲಿನ ಒತ್ತಡದ ಬಲವು ಸಣ್ಣ ಪಿಸ್ಟನ್ ಮೇಲಿನ ಒತ್ತಡದ ಬಲಕ್ಕಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ.
ಬಿ) 0.0025 ಬಾರಿ
ಇ) 0.04 ಬಾರಿ
19. 200 Pa ಸ್ಥಿರ ಒತ್ತಡದಲ್ಲಿ ವಿಸ್ತರಿಸುವ ಅನಿಲ, 1000 J ಕೆಲಸವನ್ನು ಮಾಡಿದೆ. ಆರಂಭದಲ್ಲಿ ಅನಿಲವು 1.5 ಮೀ ಪರಿಮಾಣವನ್ನು ಆಕ್ರಮಿಸಿಕೊಂಡಿದ್ದರೆ, ನಂತರ ಅನಿಲದ ಹೊಸ ಪರಿಮಾಣ
20. ವಸ್ತುವಿನಿಂದ ಚಿತ್ರಕ್ಕೆ ಇರುವ ಅಂತರವು ವಸ್ತುವಿನಿಂದ ಲೆನ್ಸ್ಗೆ ಇರುವ ಅಂತರಕ್ಕಿಂತ 3 ಪಟ್ಟು ಹೆಚ್ಚು. ಈ ಲೆನ್ಸ್...
ಎ) ಬೈಕಾನ್ಕೇವ್
ಬಿ) ಫ್ಲಾಟ್
ಸಿ) ಸಂಗ್ರಹಿಸುವುದು
ಡಿ) ಸ್ಕ್ಯಾಟರಿಂಗ್
ಇ) ಪ್ಲಾನೋ-ಕಾನ್ಕೇವ್
ವಿಭಾಗ 1. "ಸ್ಟ್ಯಾಟಿಕ್ಸ್"
ನ್ಯೂಟನ್ಸ್
ಬಲದ ತೋಳು ಬಿಂದುವಿನಿಂದ ಬಲದ ಕ್ರಿಯೆಯ ರೇಖೆಗೆ ಕಡಿಮೆ ಅಂತರವಾಗಿದೆ.
ಭುಜದ ಮೇಲಿನ ಬಲದ ಉತ್ಪನ್ನವು ಬಲದ ಕ್ಷಣಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
8. ಬಲದ ಕ್ಷಣದ ದಿಕ್ಕನ್ನು ನಿರ್ಧರಿಸಲು "ಬಲಗೈ ನಿಯಮ" ವನ್ನು ರೂಪಿಸಿ.
9. ಒಂದು ಬಿಂದುವಿಗೆ ಸಂಬಂಧಿಸಿದ ಶಕ್ತಿಗಳ ವ್ಯವಸ್ಥೆಯ ಮುಖ್ಯ ಕ್ಷಣವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ?
ಕೇಂದ್ರದ ಬಗ್ಗೆ ಮುಖ್ಯ ಕ್ಷಣವು ಒಂದೇ ಕೇಂದ್ರದ ಬಗ್ಗೆ ದೇಹಕ್ಕೆ ಅನ್ವಯಿಸಲಾದ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಕ್ಷಣಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವಾಗಿದೆ.
10. ಪಡೆಗಳ ಜೋಡಿ ಎಂದು ಯಾವುದನ್ನು ಕರೆಯುತ್ತಾರೆ? ಜೋಡಿ ಪಡೆಗಳ ಕ್ಷಣ ಯಾವುದು? ಇದು ಬಿಂದುವಿನ ಆಯ್ಕೆಯ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿದೆಯೇ? ಒಂದು ಜೋಡಿ ಪಡೆಗಳ ಕ್ಷಣದ ದಿಕ್ಕು ಮತ್ತು ಪ್ರಮಾಣ ಏನು?
ಬಲಗಳ ಜೋಡಿಯು ಬಲಗಳ ಒಂದು ವ್ಯವಸ್ಥೆಯಾಗಿದ್ದು, ಇದರಲ್ಲಿ ಬಲಗಳು ಸಮಾನ, ಸಮಾನಾಂತರ ಮತ್ತು ಪರಸ್ಪರ ವಿರುದ್ಧವಾಗಿರುತ್ತವೆ. ಕ್ಷಣವು ಭುಜದ ಮೇಲಿನ ಒಂದು ಶಕ್ತಿಯ ಉತ್ಪನ್ನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಬಿಂದುವಿನ ಆಯ್ಕೆಯ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿರುವುದಿಲ್ಲ, ಜೋಡಿಯು ಇರುವ ಸಮತಲಕ್ಕೆ ಲಂಬವಾಗಿ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ.
11. ಪಾಯಿನ್ಸಾಟ್ ಪ್ರಮೇಯವನ್ನು ರೂಪಿಸಿ.
ಸಂಪೂರ್ಣವಾಗಿ ಕಟ್ಟುನಿಟ್ಟಾದ ದೇಹದ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಗಳ ಯಾವುದೇ ವ್ಯವಸ್ಥೆಯನ್ನು ಒಂದು ಜೋಡಿ ಬಲದಿಂದ ಒಂದು ಬಲದಿಂದ ಬದಲಾಯಿಸಬಹುದು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಬಲವು ಮುಖ್ಯ ವೆಕ್ಟರ್ ಆಗಿರುತ್ತದೆ ಮತ್ತು ಜೋಡಿಯ ಕ್ಷಣವು ಈ ಶಕ್ತಿಗಳ ವ್ಯವಸ್ಥೆಯ ಮುಖ್ಯ ಕ್ಷಣವಾಗಿರುತ್ತದೆ.12. ಬಲಗಳ ವ್ಯವಸ್ಥೆಯ ಸಮತೋಲನಕ್ಕೆ ಅಗತ್ಯವಾದ ಮತ್ತು ಸಾಕಷ್ಟು ಪರಿಸ್ಥಿತಿಗಳನ್ನು ರೂಪಿಸಿ.
ಬಲಗಳ ಸಮತಟ್ಟಾದ ವ್ಯವಸ್ಥೆಯ ಸಮತೋಲನಕ್ಕಾಗಿ, ಎರಡು ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳ ಮೇಲೆ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಪ್ರಕ್ಷೇಪಗಳ ಬೀಜಗಣಿತದ ಮೊತ್ತಗಳು ಮತ್ತು ಅನಿಯಂತ್ರಿತ ಬಿಂದುವಿಗೆ ಸಂಬಂಧಿಸಿದ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಕ್ಷಣಗಳ ಬೀಜಗಣಿತದ ಮೊತ್ತವು ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಸಮತೋಲನ ಸಮೀಕರಣದ ಎರಡನೆಯ ರೂಪವು ಒಂದು ಸರಳ ರೇಖೆಯಲ್ಲಿ ಇರದ ಯಾವುದೇ ಮೂರು ಬಿಂದುಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಕ್ಷಣಗಳ ಬೀಜಗಣಿತದ ಮೊತ್ತಗಳ ಶೂನ್ಯಕ್ಕೆ ಸಮಾನತೆಯಾಗಿದೆ.
14. ಬಲಗಳ ಯಾವ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಸಮಾನ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ?
ದೇಹದ ಸ್ಥಿತಿಯನ್ನು ಉಲ್ಲಂಘಿಸದೆ, ಬಲಗಳ ಒಂದು ವ್ಯವಸ್ಥೆಯನ್ನು (ಎಫ್ 1, ಎಫ್ 2, ..., ಎಫ್ ಎನ್) ಮತ್ತೊಂದು ವ್ಯವಸ್ಥೆಯಿಂದ ಬದಲಾಯಿಸಬಹುದು (Р 1, ಪಿ 2, ..., ಪಿ ಎನ್) ಮತ್ತು ವೈಸ್ ಪ್ರತಿಯಾಗಿ, ಅಂತಹ ಶಕ್ತಿಗಳ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಸಮಾನ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ
15. ಈ ಶಕ್ತಿಗಳ ವ್ಯವಸ್ಥೆಯ ಪರಿಣಾಮವಾಗಿ ಯಾವ ಬಲವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ?
ಬಲಗಳ ವ್ಯವಸ್ಥೆಯು (F 1 , F 2 , ... , F n) ಒಂದು ಬಲ R ಗೆ ಸಮನಾಗಿದ್ದರೆ, ನಂತರ R ಅನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ. ಪರಿಣಾಮವಾಗಿ. ಫಲಿತಾಂಶದ ಬಲವು ಈ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಕ್ರಿಯೆಯನ್ನು ಬದಲಾಯಿಸಬಹುದು. ಆದರೆ ಶಕ್ತಿಗಳ ಪ್ರತಿಯೊಂದು ವ್ಯವಸ್ಥೆಯು ಫಲಿತಾಂಶವನ್ನು ಹೊಂದಿಲ್ಲ.
16. ಕೊಟ್ಟಿರುವ ಅಕ್ಷದ ಮೇಲೆ ದೇಹಕ್ಕೆ ಅನ್ವಯಿಸಲಾದ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಪ್ರಕ್ಷೇಪಗಳ ಮೊತ್ತವು ಶೂನ್ಯವಾಗಿರುತ್ತದೆ ಎಂದು ತಿಳಿದಿದೆ. ಅಂತಹ ವ್ಯವಸ್ಥೆಯ ಫಲಿತಾಂಶದ ದಿಕ್ಕು ಏನು?
17. ಜಡತ್ವದ ತತ್ವವನ್ನು ರೂಪಿಸಿ (ಗೆಲಿಲಿಯೋನ ಜಡತ್ವದ ತತ್ವ).
ಪರಸ್ಪರ ಸಮತೋಲನ ಶಕ್ತಿಗಳ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ, ವಸ್ತು ಬಿಂದು (ದೇಹ) ವಿಶ್ರಾಂತಿಯಲ್ಲಿದೆ ಅಥವಾ ಸರಳ ರೇಖೆಯಲ್ಲಿ ಮತ್ತು ಏಕರೂಪವಾಗಿ ಚಲಿಸುತ್ತದೆ
28. ಎರಡು ಬಲಗಳ ಸಮತೋಲನದ ಮೂಲತತ್ವವನ್ನು ರೂಪಿಸಿ.
ಸಂಪೂರ್ಣ ಕಟ್ಟುನಿಟ್ಟಾದ ದೇಹಕ್ಕೆ ಅನ್ವಯಿಸಲಾದ ಎರಡು ಬಲಗಳು ಸಮತೋಲಿತವಾಗಿರುತ್ತವೆ ಮತ್ತು ಅವುಗಳು ಸಂಪೂರ್ಣ ಮೌಲ್ಯದಲ್ಲಿ ಸಮಾನವಾಗಿದ್ದರೆ, ಒಂದೇ ನೇರ ಸಾಲಿನಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತವೆ ಮತ್ತು ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತವೆ.
19. ಸಂಪೂರ್ಣವಾಗಿ ಕಟ್ಟುನಿಟ್ಟಾದ ದೇಹದ ಚಲನಶಾಸ್ತ್ರದ ಸ್ಥಿತಿಯನ್ನು ಬದಲಾಯಿಸದೆ ಅದರ ಕ್ರಿಯೆಯ ರೇಖೆಯ ಉದ್ದಕ್ಕೂ ಬಲವನ್ನು ವರ್ಗಾಯಿಸಲು ಸಾಧ್ಯವೇ?
ಸಂಪೂರ್ಣವಾಗಿ ಕಟ್ಟುನಿಟ್ಟಾದ ದೇಹದ ಚಲನಶಾಸ್ತ್ರದ ಸ್ಥಿತಿಯನ್ನು ಬದಲಾಯಿಸದೆ, ಬಲವನ್ನು ಅದರ ಕ್ರಿಯೆಯ ರೇಖೆಯ ಉದ್ದಕ್ಕೂ ವರ್ಗಾಯಿಸಬಹುದು, ಅದರ ಮಾಡ್ಯುಲಸ್ ಮತ್ತು ದಿಕ್ಕನ್ನು ಬದಲಾಗದೆ ಇರಿಸಬಹುದು.
20. ಬಲಗಳ ಸಮಾನಾಂತರ ಚತುರ್ಭುಜದ ಮೂಲತತ್ವವನ್ನು ರೂಪಿಸಿ.
ದೇಹದ ಸ್ಥಿತಿಯನ್ನು ಬದಲಾಯಿಸದೆ, ಅದರ ಒಂದು ಬಿಂದುವಿಗೆ ಅನ್ವಯಿಸಲಾದ ಎರಡು ಬಲಗಳನ್ನು ಒಂದೇ ಹಂತದಲ್ಲಿ ಅನ್ವಯಿಸಲಾದ ಒಂದು ಫಲಿತಾಂಶದ ಬಲದಿಂದ ಬದಲಾಯಿಸಬಹುದು ಮತ್ತು ಅವುಗಳ ಜ್ಯಾಮಿತೀಯ ಮೊತ್ತಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
21. ನ್ಯೂಟನ್ರ ಮೂರನೇ ನಿಯಮವನ್ನು ಹೇಗೆ ರೂಪಿಸಲಾಗಿದೆ?
ಪ್ರತಿ ಕ್ರಿಯೆಗೆ ಸಮಾನ ಮತ್ತು ವಿರುದ್ಧವಾದ ಪ್ರತಿಕ್ರಿಯೆ ಇರುತ್ತದೆ.
22. ಯಾವ ಘನ ದೇಹವನ್ನು ನಾನ್-ಫ್ರೀ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ?
ವ್ಯವಸ್ಥೆಯ ದೇಹಗಳ ನಡುವೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಶಕ್ತಿಗಳನ್ನು ಆಂತರಿಕ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ.
ಹಿಂಗ್ಡ್-ಚಲಿಸುವ ಬೆಂಬಲ. ಈ ರೀತಿಯ ಸಂಪರ್ಕವನ್ನು ರಚನಾತ್ಮಕವಾಗಿ ಸಿಲಿಂಡರಾಕಾರದ ಹಿಂಜ್ ರೂಪದಲ್ಲಿ ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ, ಇದು ಮೇಲ್ಮೈ ಉದ್ದಕ್ಕೂ ಮುಕ್ತವಾಗಿ ಚಲಿಸಬಹುದು. ಸ್ಪಷ್ಟವಾದ ಬೆಂಬಲದ ಪ್ರತಿಕ್ರಿಯೆಯು ಯಾವಾಗಲೂ ಪೋಷಕ ಮೇಲ್ಮೈಗೆ ಲಂಬವಾಗಿ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ
ಹಿಂಗ್ಡ್-ಸ್ಥಿರ ಬೆಂಬಲ. ಪ್ರಮುಖವಾಗಿ ಸ್ಥಿರವಾದ ಬೆಂಬಲದ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ಅಜ್ಞಾತ ಘಟಕಗಳಾಗಿ ಪ್ರತಿನಿಧಿಸಲಾಗುತ್ತದೆ ಮತ್ತು , ಇವುಗಳ ಕ್ರಿಯೆಯ ರೇಖೆಗಳು ಸಮಾನಾಂತರವಾಗಿರುತ್ತವೆ ಅಥವಾ ಸಮನ್ವಯ ಅಕ್ಷಗಳೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತವೆ
29. ಯಾವ ಬೆಂಬಲವನ್ನು ರಿಜಿಡ್ ಸೀಲ್ (ಪಿಂಚಿಂಗ್) ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ?
ಇದು ಅಸಾಮಾನ್ಯ ರೀತಿಯ ಸಂಪರ್ಕವಾಗಿದೆ, ಏಕೆಂದರೆ ಸಮತಲದಲ್ಲಿ ಚಲನೆಯನ್ನು ತಡೆಯುವುದರ ಜೊತೆಗೆ, ಕಟ್ಟುನಿಟ್ಟಾದ ಲಗತ್ತಿಸುವಿಕೆಯು ರಾಡ್ (ಕಿರಣ) ಬಿಂದುವಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ತಿರುಗುವುದನ್ನು ತಡೆಯುತ್ತದೆ. ಆದ್ದರಿಂದ, ಬಂಧದ ಪ್ರತಿಕ್ರಿಯೆಯು ಪ್ರತಿಕ್ರಿಯೆಗೆ (, ) ಮಾತ್ರವಲ್ಲದೆ ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಕ್ಷಣಕ್ಕೂ ಕಡಿಮೆಯಾಗುತ್ತದೆ
30. ಯಾವ ಬೆಂಬಲವನ್ನು ಥ್ರಸ್ಟ್ ಬೇರಿಂಗ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ?
ಥ್ರಸ್ಟ್ ಬೇರಿಂಗ್ ಮತ್ತು ಗೋಳಾಕಾರದ ಹಿಂಜ್ ಈ ರೀತಿಯ ಸಂಪರ್ಕವನ್ನು ಕೊನೆಯಲ್ಲಿ ಗೋಳಾಕಾರದ ಮೇಲ್ಮೈಯೊಂದಿಗೆ ರಾಡ್ ಎಂದು ಪ್ರತಿನಿಧಿಸಬಹುದು, ಇದು ಗೋಳಾಕಾರದ ಕುಹರದ ಭಾಗವಾಗಿರುವ ಬೆಂಬಲಕ್ಕೆ ಲಗತ್ತಿಸಲಾಗಿದೆ. ಗೋಳಾಕಾರದ ಹಿಂಜ್ ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಯಾವುದೇ ದಿಕ್ಕಿನಲ್ಲಿ ಚಲನೆಯನ್ನು ತಡೆಯುತ್ತದೆ, ಆದ್ದರಿಂದ ಅದರ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ಮೂರು ಘಟಕಗಳಾಗಿ ಪ್ರತಿನಿಧಿಸಲಾಗುತ್ತದೆ , , , ಅನುಗುಣವಾದ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಗಳಿಗೆ ಸಮಾನಾಂತರವಾಗಿ
31. ಯಾವ ಬೆಂಬಲವನ್ನು ಗೋಳಾಕಾರದ ಹಿಂಜ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ?
32. ಯಾವ ಬಲಗಳ ವ್ಯವಸ್ಥೆಯನ್ನು ಒಮ್ಮುಖ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ? ಒಮ್ಮುಖ ಶಕ್ತಿಗಳ ವ್ಯವಸ್ಥೆಗೆ ಸಮತೋಲನ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಹೇಗೆ ರೂಪಿಸಲಾಗಿದೆ?
ಒಂದು (ಸಂಪೂರ್ಣವಾಗಿ ಕಟ್ಟುನಿಟ್ಟಾದ) ದೇಹವು ಮೂರು ಸಮಾನಾಂತರವಲ್ಲದ ಶಕ್ತಿಗಳ ಸಮತಟ್ಟಾದ ವ್ಯವಸ್ಥೆಯ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ ಸಮತೋಲನದಲ್ಲಿದ್ದರೆ (ಅಂದರೆ, ಕನಿಷ್ಠ ಎರಡು ಸಮಾನಾಂತರವಲ್ಲದ ಶಕ್ತಿಗಳು), ನಂತರ ಅವುಗಳ ಕ್ರಿಯೆಯ ರೇಖೆಗಳು ಒಂದು ಹಂತದಲ್ಲಿ ಛೇದಿಸುತ್ತವೆ.
34. ಒಂದೇ ದಿಕ್ಕಿನಲ್ಲಿ ನಿರ್ದೇಶಿಸಲಾದ ಎರಡು ಸಮಾನಾಂತರ ಶಕ್ತಿಗಳ ಮೊತ್ತ ಎಷ್ಟು? ವಿವಿಧ ದಿಕ್ಕುಗಳಲ್ಲಿ?
ಒಂದೇ ದಿಕ್ಕಿನ ಎರಡು ಸಮಾನಾಂತರ ಬಲಗಳ ಎಫ್ 1 ಮತ್ತು ಎಫ್ 2 ಫಲಿತಾಂಶವು ಒಂದೇ ದಿಕ್ಕನ್ನು ಹೊಂದಿರುತ್ತದೆ, ಅದರ ಮಾಡ್ಯೂಲ್ ಬಲಗಳ ಮಾಡ್ಯೂಲ್ಗಳ ಮೊತ್ತಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ನ ಬಿಂದುವು ಬಲಗಳ ಅನ್ವಯದ ಬಿಂದುಗಳ ನಡುವಿನ ವಿಭಾಗವನ್ನು ವಿಭಜಿಸುತ್ತದೆ ಫೋರ್ಸ್ ಮಾಡ್ಯೂಲ್ಗಳಿಗೆ ವಿಲೋಮ ಅನುಪಾತದಲ್ಲಿರುವ ಭಾಗಗಳು: R \u003d F 1 + F 2; AC / BC \u003d F 2 / F 1. ಎರಡು ವಿರುದ್ಧವಾಗಿ ನಿರ್ದೇಶಿಸಿದ ಸಮಾನಾಂತರ ಬಲಗಳ ಫಲಿತಾಂಶವು ಬಲದ ದಿಕ್ಕನ್ನು ಹೊಂದಿರುತ್ತದೆ ಮತ್ತು ಬಲದ ಮಾಡ್ಯೂಲ್ಗಳಲ್ಲಿನ ವ್ಯತ್ಯಾಸಕ್ಕೆ ಸಮಾನವಾದ ಮಾಡ್ಯೂಲ್ ಅನ್ನು ಹೊಂದಿರುತ್ತದೆ.
37. ವರಿಗ್ನಾನ್ ಪ್ರಮೇಯವನ್ನು ಹೇಗೆ ರೂಪಿಸಲಾಗಿದೆ?
ಪರಿಗಣನೆಯಲ್ಲಿರುವ ಬಲಗಳ ಸಮತಲ ವ್ಯವಸ್ಥೆಯನ್ನು ಫಲಿತಾಂಶಕ್ಕೆ ಇಳಿಸಿದರೆ, ಯಾವುದೇ ಬಿಂದುವಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಈ ಫಲಿತಾಂಶದ ಕ್ಷಣವು ಆ ಹಂತಕ್ಕೆ ಹೋಲಿಸಿದರೆ ನಿರ್ದಿಷ್ಟ ವ್ಯವಸ್ಥೆಯ ಎಲ್ಲಾ ಶಕ್ತಿಗಳ ಕ್ಷಣಗಳ ಬೀಜಗಣಿತ ಮೊತ್ತಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
40. ಸಮಾನಾಂತರ ಶಕ್ತಿಗಳ ಕೇಂದ್ರವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ?
ವರಿಗ್ನಾನ್ ಪ್ರಮೇಯದ ಪ್ರಕಾರ
41. ಘನ ದೇಹದ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೇಂದ್ರವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ?
45. ತ್ರಿಕೋನದ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೇಂದ್ರ ಎಲ್ಲಿದೆ?
ಮಧ್ಯವರ್ತಿಗಳ ಛೇದನ ಬಿಂದು
46. ಪಿರಮಿಡ್ ಮತ್ತು ಕೋನ್ನ ಗುರುತ್ವಾಕರ್ಷಣೆಯ ಕೇಂದ್ರ ಎಲ್ಲಿದೆ?
ವಿಭಾಗ 2. "ಚಲನಶಾಸ್ತ್ರ"
1. ಬಿಂದುವಿನ ಪಥ ಎಂದು ಏನನ್ನು ಕರೆಯುತ್ತಾರೆ? ಬಿಂದುವಿನ ಯಾವ ಚಲನೆಯನ್ನು ರೆಕ್ಟಿಲಿನಿಯರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ? ಕರ್ವಿಲಿನಾರ್?
ವಸ್ತುವು ಚಲಿಸುವ ರೇಖೆ ಚುಕ್ಕೆ , ಪಥ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ .
ಪಥವು ನೇರ ರೇಖೆಯಾಗಿದ್ದರೆ, ಬಿಂದುವಿನ ಚಲನೆಯನ್ನು ರೆಕ್ಟಿಲಿನಿಯರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ; ಪಥವು ಬಾಗಿದ ರೇಖೆಯಾಗಿದ್ದರೆ, ಚಲನೆಯನ್ನು ಕರ್ವಿಲಿನಿಯರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ
2. ಕಾರ್ಟೇಶಿಯನ್ ಆಯತಾಕಾರದ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಹೇಗೆ ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿದೆ?
3. ಸ್ಥಿರ (ಜಡತ್ವ) ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಬಿಂದುವಿನ ಸಂಪೂರ್ಣ ವೇಗವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ? ಅದರ ಪಥಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ವೇಗ ವೆಕ್ಟರ್ ಅನ್ನು ಹೇಗೆ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ? ಕಾರ್ಟೀಸಿಯನ್ ನಿರ್ದೇಶಾಂಕಗಳ ಅಕ್ಷದ ಮೇಲೆ ಬಿಂದುವಿನ ವೇಗದ ಪ್ರಕ್ಷೇಪಣ ಏನು?
ಒಂದು ಬಿಂದುವಿಗೆ, ಈ ಅವಲಂಬನೆಗಳು ಕೆಳಕಂಡಂತಿವೆ: ಬಿಂದುವಿನ ಸಂಪೂರ್ಣ ವೇಗವು ಸಾಪೇಕ್ಷ ಮತ್ತು ಅನುವಾದ ವೇಗಗಳ ಜ್ಯಾಮಿತೀಯ ಮೊತ್ತಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಅಂದರೆ:
![]()
![]() .
.
3. ಸ್ಥಿರ (ಜಡತ್ವ) ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಬಿಂದುವಿನ ಸಂಪೂರ್ಣ ವೇಗವರ್ಧಕವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ? ಕಾರ್ಟೀಸಿಯನ್ ನಿರ್ದೇಶಾಂಕಗಳ ಅಕ್ಷದ ಮೇಲೆ ಬಿಂದುವಿನ ವೇಗವರ್ಧನೆಯ ಪ್ರಕ್ಷೇಪಗಳು ಯಾವುವು?
5. ಸ್ಥಿರ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗಿದಾಗ ಕಟ್ಟುನಿಟ್ಟಾದ ದೇಹದ ಕೋನೀಯ ವೇಗ ವೆಕ್ಟರ್ ಅನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ? ಕೋನೀಯ ವೇಗ ವೆಕ್ಟರ್ನ ದಿಕ್ಕು ಯಾವುದು?
ಕೋನೀಯ ವೇಗ- ದೇಹದ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ನಿರೂಪಿಸುವ ವೆಕ್ಟರ್ ಭೌತಿಕ ಪ್ರಮಾಣ. ಕೋನೀಯ ವೇಗ ವೆಕ್ಟರ್ ಪ್ರತಿ ಯುನಿಟ್ ಸಮಯಕ್ಕೆ ದೇಹದ ತಿರುಗುವಿಕೆಯ ಕೋನಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ:
ಮತ್ತು ಗಿಮ್ಲೆಟ್ನ ನಿಯಮದ ಪ್ರಕಾರ ತಿರುಗುವಿಕೆಯ ಅಕ್ಷದ ಉದ್ದಕ್ಕೂ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ, ಅಂದರೆ, ಬಲಗೈ ದಾರವನ್ನು ಹೊಂದಿರುವ ಗಿಮ್ಲೆಟ್ ಅನ್ನು ಅದೇ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗಿಸಿದರೆ ಅದನ್ನು ತಿರುಗಿಸಲಾಗುತ್ತದೆ.
6. ಸ್ಥಿರ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗಿದಾಗ ಕಟ್ಟುನಿಟ್ಟಾದ ದೇಹದ ಕೋನೀಯ ವೇಗವರ್ಧಕ ವೆಕ್ಟರ್ ಅನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ? ಕೋನೀಯ ವೇಗವರ್ಧಕ ವೆಕ್ಟರ್ನ ದಿಕ್ಕು ಯಾವುದು?
ದೇಹವು ಸ್ಥಿರ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗಿದಾಗ, ಕೋನೀಯ ವೇಗವರ್ಧಕ ಮಾಡ್ಯುಲೋ:

ಕೋನೀಯ ವೇಗವರ್ಧಕ ವೆಕ್ಟರ್ α ತಿರುಗುವಿಕೆಯ ಅಕ್ಷದ ಉದ್ದಕ್ಕೂ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ (ವೇಗವರ್ಧಿತ ತಿರುಗುವಿಕೆಯೊಂದಿಗೆ ಬದಿಗೆ ಮತ್ತು ವಿರುದ್ಧವಾಗಿ - ನಿಧಾನ ತಿರುಗುವಿಕೆಯೊಂದಿಗೆ).
ಸ್ಥಿರ ಬಿಂದುವಿನ ಸುತ್ತಲೂ ತಿರುಗುವಾಗ, ಕೋನೀಯ ವೇಗವರ್ಧಕ ವೆಕ್ಟರ್ ಅನ್ನು ಸಮಯಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಕೋನೀಯ ವೇಗ ವೆಕ್ಟರ್ ω ನ ಮೊದಲ ಉತ್ಪನ್ನ ಎಂದು ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿದೆ, ಅಂದರೆ.
8. ಸಂಕೀರ್ಣ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ಒಂದು ಬಿಂದುವಿನ ಸಂಪೂರ್ಣ, ಸಾಂಕೇತಿಕ ಮತ್ತು ಸಾಪೇಕ್ಷ ವೇಗಗಳು ಯಾವುವು?
9. ಒಂದು ಬಿಂದುವಿನ ಸಂಕೀರ್ಣ ಚಲನೆಗೆ ಪೋರ್ಟಬಲ್ ಮತ್ತು ಸಾಪೇಕ್ಷ ವೇಗವರ್ಧಕಗಳನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ?
10. ಬಿಂದುವಿನ ಸಂಕೀರ್ಣ ಚಲನೆಯ ಸಂದರ್ಭದಲ್ಲಿ ಕೊರಿಯೊಲಿಸ್ ವೇಗವರ್ಧನೆಯನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ?
11. ಕೊರಿಯೊಲಿಸ್ ಪ್ರಮೇಯವನ್ನು ರೂಪಿಸಿ.
ವೇಗವರ್ಧನೆ ಸೇರ್ಪಡೆ ಪ್ರಮೇಯ (ಕೊರಿಯೊಲಿಸ್ ಪ್ರಮೇಯ): ![]() , ಎಲ್ಲಿ
, ಎಲ್ಲಿ ![]() - ಕೊರಿಯೊಲಿಸ್ ವೇಗವರ್ಧನೆ (ಕೊರಿಯೊಲಿಸ್ ವೇಗವರ್ಧನೆ) - ಭಾಷಾಂತರವಲ್ಲದ ಅನುವಾದ ಚಲನೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ಸಂಪೂರ್ಣ ವೇಗವರ್ಧನೆ = ಅನುವಾದ, ಸಾಪೇಕ್ಷ ಮತ್ತು ಕೊರಿಯೊಲಿಸ್ ವೇಗವರ್ಧಕಗಳ ಜ್ಯಾಮಿತೀಯ ಮೊತ್ತ.
- ಕೊರಿಯೊಲಿಸ್ ವೇಗವರ್ಧನೆ (ಕೊರಿಯೊಲಿಸ್ ವೇಗವರ್ಧನೆ) - ಭಾಷಾಂತರವಲ್ಲದ ಅನುವಾದ ಚಲನೆಯ ಸಂದರ್ಭದಲ್ಲಿ, ಸಂಪೂರ್ಣ ವೇಗವರ್ಧನೆ = ಅನುವಾದ, ಸಾಪೇಕ್ಷ ಮತ್ತು ಕೊರಿಯೊಲಿಸ್ ವೇಗವರ್ಧಕಗಳ ಜ್ಯಾಮಿತೀಯ ಮೊತ್ತ.
12. ಯಾವ ಚಲನೆಗಳ ಅಡಿಯಲ್ಲಿ ಬಿಂದುಗಳು ಶೂನ್ಯಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ:
ಎ) ಸ್ಪರ್ಶದ ವೇಗವರ್ಧನೆ?
ಬಿ) ಸಾಮಾನ್ಯ ವೇಗವರ್ಧನೆ?
14. ದೇಹದ ಯಾವ ಚಲನೆಯನ್ನು ಅನುವಾದ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ? ಅಂತಹ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ಬಿಂದುಗಳ ವೇಗ ಮತ್ತು ವೇಗವರ್ಧನೆಗಳು ಯಾವುವು?
16. ಯಾವ ದೇಹದ ಚಲನೆಯನ್ನು ತಿರುಗುವಿಕೆ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ? ಅಂತಹ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ಬಿಂದುಗಳ ವೇಗ ಮತ್ತು ವೇಗವರ್ಧನೆಗಳು ಯಾವುವು?
17. ಸ್ಥಿರ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗುವ ಕಟ್ಟುನಿಟ್ಟಿನ ದೇಹದ ಬಿಂದುವಿನ ಸ್ಪರ್ಶಕ ಮತ್ತು ಕೇಂದ್ರಾಭಿಮುಖ ವೇಗವರ್ಧನೆಗಳನ್ನು ಹೇಗೆ ವ್ಯಕ್ತಪಡಿಸಲಾಗುತ್ತದೆ?
18. ಸ್ಥಿರ ಅಕ್ಷದ ಸುತ್ತ ತಿರುಗುವ ಕಟ್ಟುನಿಟ್ಟಿನ ದೇಹದ ಬಿಂದುಗಳ ಸ್ಥಳ ಯಾವುದು, ನಿರ್ದಿಷ್ಟ ಕ್ಷಣದಲ್ಲಿ ವೇಗಗಳು ಒಂದೇ ಪರಿಮಾಣ ಮತ್ತು ಒಂದೇ ದಿಕ್ಕನ್ನು ಹೊಂದಿರುತ್ತವೆ?
19. ದೇಹದ ಯಾವ ಚಲನೆಯನ್ನು ಸಮತಲ-ಸಮಾನಾಂತರ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ? ಅಂತಹ ಚಲನೆಯ ಸಮಯದಲ್ಲಿ ದೇಹದ ಬಿಂದುಗಳ ವೇಗ ಮತ್ತು ವೇಗವರ್ಧನೆಗಳು ಯಾವುವು?
20. ಫ್ಲಾಟ್ ಫಿಗರ್ ತನ್ನ ಸ್ವಂತ ಸಮತಲದಲ್ಲಿ ಚಲಿಸುವ ವೇಗದ ತ್ವರಿತ ಕೇಂದ್ರವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ?
21. ಸಮತಲದ ಆಕೃತಿಯ ಎರಡು ಬಿಂದುಗಳ ವೇಗವು ತಿಳಿದಿದ್ದರೆ, ವೇಗಗಳ ತ್ವರಿತ ಕೇಂದ್ರದ ಸ್ಥಾನವನ್ನು ಸಚಿತ್ರವಾಗಿ ಹೇಗೆ ಕಂಡುಹಿಡಿಯಬಹುದು?
22. ಈ ಆಕೃತಿಯ ತತ್ಕ್ಷಣದ ತಿರುಗುವಿಕೆಯ ಕೇಂದ್ರವನ್ನು ಅನಂತವಾಗಿ ತೆಗೆದುಹಾಕಿದಾಗ ಸಮತಟ್ಟಾದ ಆಕೃತಿಯ ಬಿಂದುಗಳ ವೇಗಗಳು ಯಾವುವು?
23. ಈ ಬಿಂದುಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ನೇರ ರೇಖೆಯ ಮೇಲೆ ಪ್ಲೇನ್ ಫಿಗರ್ನ ಎರಡು ಬಿಂದುಗಳ ವೇಗದ ಪ್ರಕ್ಷೇಪಗಳು ಹೇಗೆ ಸಂಬಂಧಿಸಿವೆ?
24. ಎರಡು ಅಂಕಗಳನ್ನು ನೀಡಲಾಗಿದೆ ( ಆದರೆಮತ್ತು AT) ಚಲಿಸುವ ಫ್ಲಾಟ್ ಫಿಗರ್, ಮತ್ತು ಇದು ಒಂದು ಬಿಂದುವಿನ ವೇಗ ಎಂದು ತಿಳಿದಿದೆ ಆದರೆಗೆ ಲಂಬವಾಗಿ ಎಬಿ. ಬಿಂದುವಿನ ವೇಗ ಹೇಗಿದೆ AT?
ವಿಭಾಗ 1. "ಸ್ಟ್ಯಾಟಿಕ್ಸ್"
1. ಘನವಸ್ತುವಿನ ಮೇಲೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಬಲವನ್ನು ಯಾವ ಅಂಶಗಳು ನಿರ್ಧರಿಸುತ್ತವೆ
2. "SI" ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಬಲವನ್ನು ಯಾವ ಘಟಕಗಳಲ್ಲಿ ಅಳೆಯಲಾಗುತ್ತದೆ?
ನ್ಯೂಟನ್ಸ್
3. ಬಲಗಳ ವ್ಯವಸ್ಥೆಯ ಮುಖ್ಯ ವೆಕ್ಟರ್ ಯಾವುದು? ನಿರ್ದಿಷ್ಟ ಶಕ್ತಿಗಳ ವ್ಯವಸ್ಥೆಗೆ ಬಲ ಬಹುಭುಜಾಕೃತಿಯನ್ನು ಹೇಗೆ ನಿರ್ಮಿಸುವುದು?
ಮುಖ್ಯ ವೆಕ್ಟರ್ ದೇಹಕ್ಕೆ ಅನ್ವಯಿಸಲಾದ ಎಲ್ಲಾ ಬಲಗಳ ವೆಕ್ಟರ್ ಮೊತ್ತವಾಗಿದೆ
5. ನಿರ್ದಿಷ್ಟ ಬಿಂದುವಿನ ಬಗ್ಗೆ ಬಲದ ಕ್ಷಣ ಎಂದು ಏನು ಕರೆಯುತ್ತಾರೆ? ಫೋರ್ಸ್ ವೆಕ್ಟರ್ ಮತ್ತು ಫೋರ್ಸ್ ಅಪ್ಲಿಕೇಶನ್ ಪಾಯಿಂಟ್ನ ತ್ರಿಜ್ಯದ ವೆಕ್ಟರ್ಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಬಲದ ಕ್ಷಣವನ್ನು ಹೇಗೆ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ?
ಒಂದು ಬಿಂದು (ಕೇಂದ್ರ) ಗೆ ಸಂಬಂಧಿಸಿದ ಬಲದ ಕ್ಷಣವು ಬಲ ಮತ್ತು ಭುಜದ ಮಾಡ್ಯುಲಸ್ನ ಉತ್ಪನ್ನಕ್ಕೆ ಸಂಖ್ಯಾತ್ಮಕವಾಗಿ ಸಮಾನವಾದ ವೆಕ್ಟರ್ ಆಗಿದೆ, ಅಂದರೆ, ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಬಿಂದುವಿನಿಂದ ಬಲದ ಕ್ರಿಯೆಯ ರೇಖೆಗೆ ಕಡಿಮೆ ಅಂತರ. ಇದು ಬಲದ ಪ್ರಸರಣದ ಸಮತಲಕ್ಕೆ ಲಂಬವಾಗಿ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತದೆ ಮತ್ತು ಆರ್.ವಿ. ಅಂಕಗಳು.
6. ಯಾವ ಸಂದರ್ಭದಲ್ಲಿ ಬಲದ ಕ್ಷಣವು ಶೂನ್ಯಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ?
ಭುಜವು 0 ಆಗಿರುವಾಗ (ಕ್ಷಣಗಳ ಕೇಂದ್ರವು ಬಲದ ಕ್ರಿಯೆಯ ರೇಖೆಯ ಮೇಲೆ ಇದೆ)
7. ಬಿಂದುವಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ ಬಲದ ಭುಜವನ್ನು ಹೇಗೆ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ? ತೋಳಿನ ಮೇಲಿನ ಬಲದ ಉತ್ಪನ್ನ ಯಾವುದು?