Microcircuite controlate magnetic. Clasificarea și aplicațiile senzorilor
Circuitele logice integrate controlate magnetic K1116 sunt o clasă specială de dispozitive semiconductoare, al căror tip de acțiune se bazează pe o modificare a semnalului la ieșire atunci când sunt expuse la un câmp magnetic extern. Cu alte cuvinte, cipurile acționează ca o cheie controlată de un câmp magnetic. Microcircuitele controlate magnetic sunt folosite ca elemente sensibile în senzorii magnetici pentru curent și tensiune, viteză și sens de rotație, unghi de rotație și poziție, debit de gaz și lichid etc. alarma antiefractie, sisteme de aprindere electronică în motoare ardere internă, tastaturi electronice etc. Microcircuitele conțin un convertor de câmp magnetic pe cip și un amplificator de semnal. Un element Hall cu 4 electrozi este folosit ca convertor.
K1116KP1 - senzori unipolari, realizati intr-un pachet SIP cu 5 pini 13x7x2 mm. Nivelul de tensiune la ieșirea senzorilor depinde de valoarea inducției câmpului magnetic de aceeași polaritate. În absența unui câmp magnetic, ieșirea senzorilor corespunde cu 1 logic. Când tensiunea depășește nivelul tensiunii de declanșare, trece la o stare logică zero. Imunitatea crescută la zgomot a microcircuitelor este garantată de prezența histerezisului (cu o inducție de 3..9 mT) pe caracteristica de comutare. Microcircuitele au două ieșiri în mod comun cu colector deschis și o intrare stroboscopică. Atunci când la această intrare este aplicat un impuls stroboscopic cu nivelul 0, nivelul tensiunii de ieșire nu va depinde de influența câmpului magnetic extern. Dacă intrarea nu este utilizată, aceasta trebuie conectată la firul de alimentare pozitiv.
Efectul Hall este utilizat pe scară largă în senzorii de curent fără contact. O altă direcție sunt senzorii de deplasare, în care elementul Hall este atașat la un șasiu staționar, iar magnetul însuși este situat pe partea în mișcare a obiectului studiat. Deoarece semnalul de ieșire al unui senzor Hall este proporțional cu inducția câmpului magnetic și nu cu rata de schimbare, acest lucru oferă un avantaj semnificativ în precizie în comparație cu senzorii inductivi similari.
Elementele magnetosensibile care folosesc efectul Hall sunt de obicei numite „Senzori Hall”. Există senzori Hall simpli și integrali. Pe lângă placa semiconductoare, acestea din urmă conțin un model de amplificator încorporat. Parametri tipici senzorilor Hall integrați: tensiune de alimentare 2,5...5 V sau 4,5...18 V, consum de curent 8...20 mA, inducție magnetică minimă înregistrată 2...10 mT, semnal de ieșire - analog (modulat în amplitudine) tensiune) sau digitală (colector deschis, element CMOS, impulsuri PWM).
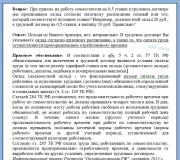
În fig. 3.74 a...m arată diagramele pentru conectarea senzorilor Hall la MK.
Orez. 3,74. Diagrame pentru conectarea senzorilor Hall la MK (început):
a) Senzorul Hall DAI are o ieșire cu colector deschis și un circuit de protecție la scurtcircuit încorporat pentru șina de alimentare. Microcircuitul UR1101ХП29 reacționează la un câmp magnetic de polaritate pozitivă, UR1101ХП49 - la un câmp de polaritate pozitivă și negativă cu efect de memorie de declanșare;
b) dioda VD1 protejează intrarea MK de alimentarea accidentală a tensiunii pozitive ridicate. Condensatorul C J reduce zgomotul provenit de la senzorul Hall prin fire lungi;
c) pornirea/oprirea senzorului Hall DAI pe baza semnalelor de la ieșirea MK. Senzorul răspunde la câmpurile magnetice atât în direcții pozitive cât și negative. Înlocuire microcircuit /)/!/- K1116KP2;

Orez. 3,74. Diagrame pentru conectarea senzorilor Hall la MK (continuare):
d) Senzor Hall?14/ (Ampson Technology) are două ieșiri antifază. Semnalul direct este furnizat către MK, iar semnalul invers este furnizat actuatorului extern printr-o ieșire cu colector deschis;
e) pentru a amplifica semnalul de la senzorul Hall?14/ (Allegro MicroSystems), se folosește op-amp DA2. Rezistorul RI stabilește tensiunea inițială la intrarea MK, aproape de jumătate din putere. Rezistorul /?J reglează amplificarea/sensibilitatea;
e) un senzor de turație a motorului de foraj, realizat pe un microansamblu specializat DAI cu cadru deschis care conține un senzor Hall pe un substrat. Un amplificator de tensiune în două trepte este asamblat la amplificatorul operațional DA2 (reglat de rezistența RW Rezistorul /?/ echilibrează circuitul de punte situat în interiorul DAI, care este necesar pentru calibrarea inițială a citirilor);
g) conectarea senzorului Hall DA / (Allegro MicroSystems) la M K printr-un amplificator operațional cu zgomot redus DA2.1 și un filtru trece-jos cu două legături (R5, C1, R6, C2). Rezistorul R4 stabilește câștigul;
|
|

Orez. 3,74. Diagrame pentru conectarea senzorilor Hall la YK (capăt):
h) cip DA! (Melexis) este un senzor inteligent de câmp magnetic cu un DSP intern și propriul sistem de comandă. Într-un mod diferit, cipul DA! numit „senzor digital Hall”. Interfața de comunicare cu trei fire amintește de SPI, dar în loc de două linii separate MISO și MOSI, se realizează o linie combinată MISO-MOSI;
w) DA1 este un cip cu senzor Hall, utilizat pe scară largă la tastaturile computerelor;
j) un comparator analogic pe cipul DA1 (Maxim Integrated Products) oferă margini abrupte ale semnalului la intrarea MK. Pragul de răspuns este determinat de divizorul /?/, R3\ l) DA! - acesta este un cip cu senzor Hall „scos” dintr-un ventilator al computerului; l) un amplificator operațional economic pe cipul Z)/42 (Telefunken) amplifică semnalul senzorului Hall DAL Tranzistorul VT1 servește ca comutator și generează impulsuri dreptunghiulare la ieșire.
Articolul vorbește despre actualizări importante și notabile pe piața senzorilor de mișcare în 2009, unde două grupuri semnificative se remarcă printre noile oferte de la producători de top: senzori controlați magnetic și componente MEMS - senzori de poziție, viteză, accelerație, giroscoape și senzori multisenzori. .
Introducere
ÎN ultimii ani tehnologiile de măsurare fără contact au fost dezvoltate în mod activ diverși parametri mișcare mecanică- apropiere, poziție și viteză, mișcare, distanță, nivel, unghi, înclinare, orientare, liniară și unghiulară, precum și mișcare multi-turn sau chiar neliniară. Avantajul tehnologiilor contactless este absența uzurii piese mecanice, durată de viață ridicată, teoretic nesfârșită, simplificare a proiectelor și a metodelor de instalare. În cele mai multe cazuri, senzorul este un stator, iar partea în mișcare (rotorul) este conectată mecanic la obiectul ai cărui parametri de mișcare sunt detectați.
Grupul de senzori de mișcare este extins și include comutatoare, senzori de poziție analogici și digitali, senzori de viteză, codificatoare și o varietate de opțiuni combinate cu funcționalitatea de măsurare a dispozitivului tactil de bază și funcțiile funcționale suplimentare adăugate sau dezactivate. Parametrii cheie de detecție pentru acest tip de senzor sunt cinematici: poziție și viteză, fără a lua în considerare accelerația sau vibrația. Cele mai populare din ultimii ani au fost tehnologiile controlate magnetic fără contact, insensibile la murdărie, întuneric, umiditate, oferind precizie și fiabilitate ridicate, dar, datorită cerințelor moderne de măsurare în creștere, necesită caracteristici de performanță îmbunătățite și prețuri mai mici.
Grupul extins de senzori de mișcare mecanică include și accelerometre - senzori de accelerație, vibrații, înclinare (inclinometri), giroscoape - senzori de viteză unghiulară atașați direct obiectului a cărui poziție este măsurată. Majoritatea dispozitivelor din acest grup sunt componente MEMS, de asemenea clasificate ca fără contact aparate de masura, în care este simulat artificial un proces micromecanic similar mișcării detectate.
Sistemul de navigație inerțială (Inertial Measurement Unit, blocuri IMU) determină coordonatele, viteza, accelerația și alți parametri de bază ai mișcării obiectului, folosind principiul modelării mișcării de translație a acestuia, caracterizată printr-o modificare a accelerației, vitezei și coordonatelor în timp, procesul de mișcare a elementului sensibil (masa inerțială) al accelerometrului spațial cu trei componente în unele staționare sistem original referință în raport cu care se fac măsurătorile inerțiale. Accelerometrul detectează accelerația de-a lungul fiecărei axe, unitatea IMU integrează ecuația diferențială de bază: se realizează o singură integrare pentru a calcula viteza, se realizează o integrare dublă pentru a determina coordonatele. Orientarea axelor de măsurare ale accelerometrelor în direcții date este efectuată de giroscoape - libere sau controlate de semnale de la accelerometre.
Nu numai coordonatele, ci și poziția liniară și unghiulară pot fi măsurate sau corectate prin dublă integrare, de exemplu, cu accelerometre și giroscoape atașate la rotor și la obiectul (obiectele) statorului. Integrarea o dată returnează viteza obiectului. Deja, scopul multor accelerometre și giroscoape este de a compensa și stabiliza măsurătorile de bază (compensarea gravitației în navigație, compensarea măsurătorilor de nivel, stabilizarea camerelor video etc.), și de a corecta, prin aceste aparate de măsură, parametrii cinematici de bază. detectate de senzorii de poziție și viteză, luând în considerare, de exemplu, vibrația este o țintă pentru evoluțiile viitoare.
Senzorii de debit sunt, de exemplu, senzori de viteză, iar senzorii de presiune sau de nivel în unele cazuri pot fi numiți senzori de deplasare calibrați. Caracterul comun al multor senzori de mărimi mecanice este măsurarea oricăror parametri ai mișcării mecanice, iar o diferență importantă este locația elementului în mișcare, a cărui mișcare este înregistrată: în afara senzorului integral (senzori controlați magnetic) sau în senzorul propriu-zis (MEMS).
Ceea ce este comun tuturor senzorilor mecanici de mișcare este faptul că grupul de dispozitive desemnat este caracterizat de o dezvoltare continuă - completarea bazei elementului și adăugarea de moduri de operare cu așteptarea unei satisfacții maxime a cerințelor sistemelor cunoscute și a aplicațiilor nou apărute, care se aplică atât senzorilor controlați magnetic fără contact, cât și componentelor MEMS.
Aplicațiile pentru senzorii de mișcare includ aplicații auto, industriale, de consum, instrumente, aviație, militare, marine și alte aplicații. Producția în masă de ieftine aparate moderne cu caracteristici de înaltă performanță – o realizare datorită influenței reciproce continue a acestor piețe.
Noile componente tactile introduse în 2009 sunt și mai funcționale, mai precise, mai mici decât înainte și pret mic rămâne la același nivel.
Noi componente controlate magnetic
Tehnologiile de măsurare controlate magnetic sunt astăzi asociate cu sistemele auto și codificatoarele Hall - MLX90316 Melexis, linia extinsă de Austriamicrosystems și altele, datorită cărora a devenit posibilitate reală detectarea fiabilă și precisă a domeniului unghiular de 360° cu furnizarea de interfețe digitale, precum și detectarea de înaltă rezoluție a mișcărilor liniare semnificative - odată cu apariția encoderului IC-ML iC-Haus. Principiul codificatorului dezvoltat se caracterizează prin stabilitate la temperatură și insensibilitate semnificativă la toleranțele magnetice și mecanice.
Noile propuneri pentru senzori Hall se referă la optimizarea cerințelor aplicațiilor, cele cheie fiind fiabilitatea, acuratețea, interfețele speciale și prețul scăzut. Multe dispozitive noi sunt introduse pentru aplicații cu costuri reduse, cu domenii limitate de detecție unghiulară, unde nu este necesară o precizie ridicată și pot fi utilizate codificatoare, dar nu sunt soluția optimă în ceea ce privește prețul dispozitivului.
Prima jumătate a anului 2009 a văzut introducerea pe piață a mai multor oferte de componente de codificator magnetorezistiv înalt integrat, care sunt mai sensibile la câmpurile magnetice decât codificatoarele Hall.
Deși efectul GMR, a cărui fizică este discutată în, este promițător pentru multe tipuri de măsurători, perioadă lungă de timp complet integrat oferte comerciale nu au existat elemente bazate pe efectul GMR.
În 2009, Infineon a anunțat lansarea codificatoarelor TLE 5011/5012 GMR (componenta de bază a seriei TLE5010 a fost introdusă puțin mai devreme, dar comercializarea acesteia nu a fost intenționată). Codificatoarele Infineon GMR (Fig. 1) sunt primele codificatoare GMR unghiulare de 360° complet integrate cu o interfață digitală, care detectează orientarea câmpului magnetic prin estimarea sinus-cosinus cu elemente unghiulare monolitice integrate - așa-numitele elemente de rezistență Giant Magneto Resistance (iGMR) integrate. . Comunicarea datelor se realizează printr-o interfață bidirecțională Synchronous Serial Communication (SSC) - compatibilă SPI. Temperatura de functionare dispozitive -40... +150 °C - concepute pentru aplicații auto. Mai multe informații despre acești senzori pot fi găsite în.
Orez. 1. Encodere GMR integrate Infineon TLE5011, TLE5012:
a) apariția IC-ului în pachetul PG-DSO-8;
b) schema funcțională simplificată a TLE5011;
c) principiul de măsurare;
d) semnale primare de ieșire
La evenimentul Sensors Expo&Conference desfășurat la Detroit în luna iunie a acestui an, Hitachi Metals și-a prezentat componentele GMR integrate cu supapă de rotație (Fig. 2), care funcționează la temperaturi de -40... + 150 °C, ceea ce face posibilă luarea în considerare utilizarea lor în sistemele auto, dar aceste dispozitive necesită o interfață specială.

Orez. 2. Noi senzori GMR integrati de la Hitachi Metals
Cu toate acestea, scopul acestui articol nu este de a vorbi despre toate actualizările liniilor de componente controlate magnetic, ci doar despre cele mai vizibile dintre ele. Prin urmare, următoarea actualizare cheie despre care merită să vorbim mai detaliat este noul senzor de unghi integrat de magnetorezistă de tunel (TMP) al NVE.
Noul senzor de unghi NVE bazat pe efectul TMR
La sfârșitul lunii martie 2009, NVE Corporation a anunțat introducerea AAT001-10E (Fig. 3), un nou senzor de unghi TMP integrat cu ieșire incrementală în cuadratura și acest dispozitiv diferă de mulți analogi prin faptul că oferă nivel înalt semnal fără amplificare. AAT001-10E este primul senzor NVE comercial și prima soluție din lume bazată pe efectul de Magnetorerezistență de Tunnel (TMR), depășind efectul Magnetorezistență Gigant (GMR).

Orez. 3. Noul senzor de unghi TMR integrat NVE:
a, b) aspectul și modurile de funcționare tipice ale dispozitivului;
c) principiul de măsurare utilizat;
d) configurația rezistenței punții;
e) semnale de ieşire ale dispozitivului senzor cu variaţii ale întrefierului
NVE este un lider în implementarea practică a spintronicii sau a nanotehnologiei, care se bazează pe utilizarea proprietăților spinurilor electronice (mai degrabă decât a sarcinilor electronice) pentru a colecta, stoca și transmite informații. Compania produce senzori și izolatori magnetici pentru colectarea și transmiterea datelor. NVE a licențiat, de asemenea, tehnologia sa spintronică MRAM - Memorie cu acces aleatoriu magnetoresistiv.
Pentru informații despre fizica efectului GMR și opțiunile pentru aplicarea acestuia în NVE și alți senzori, se recomandă să vă referiți la lucrare.
Efectul, cunoscut și sub denumirea de tunel dependent de spin (SDT; Magnetic Tunnel Junction, MTJ; Tunneling Magnetic Junction, TMJ) sau efectul de magnetoresistență de tunel (Tunneling Magnetoresistance), este un efect cuantic spintronic al schimbării mari a magnetorezisnței într-un strat izolator. în funcţie de câmpul magnetic care acţionează asupra acestuia şi de spinul electronului dominant astfel creat în stratul liber.
Senzorul AAT001-10E a fost proiectat pentru următoarele aplicații:
- codificatoare unghiulare;
- Senzori de unghi auto;
- senzori pentru unghiul arborelui;
- senzori de poziție pentru mânere și butoane.
AAT001-10E este deja disponibil comercial și este oferit clienților pentru 1,94 USD în cantități de 1.000. De asemenea, au fost dezvoltați magneți de ferită de tip Split-pole (magnetizat diametral) pentru utilizarea cu senzori, costul lor fiind de 1,15 USD fiecare în cantități de 1000 de bucăți. Clienții își pot folosi și proprii magneți.
Senzorii sunt furnizați într-un pachet TDFN ultra-miniatural cu 6 fire care măsoară 2,5x2,5x0,8mm. ÎN aplicație tipică un magnet extern asigură un câmp de saturare de 30-200 Oe sau 0,4-2,5 A/m (1 Oe = 10 3 /(4Pi) A/m = 79,5775 A/m) în planul acestui senzor (Fig. 3a-c ).
Efectul TMR produce un semnal foarte mare fără amplificare (ceea ce este important pentru obținerea unei precizii ridicate), toleranțe largi ale spațiului de aer, consum redus de energie datorită rezistenței ridicate a elementului.
Noul dispozitiv include patru elemente TMR configurate ca un senzor de unghi cu ieșiri sinus și cosinus în cuadratura (Fig. 4c-e). Senzorul de unghi AAT001-10E este o serie de elemente TMR rotite la 90° unul față de celălalt
unul față de celălalt în carcasa senzorului și conectat într-o configurație de punte (Fig. 3d).
Fiecare dintre elementele senzorului conține două straturi magnetice: un strat „prins” sau un strat cu o direcție fixă de magnetizare și un strat „liber” cu o direcție de magnetizare care poate varia proporțional cu unghiul de rotație (această configurație este prezentată în fig. 3c). Un magnet extern asigură un câmp magnetic saturator, așa cum se arată în Fig. 3a-b, pentru o bandă și magnet magnetizat diametral.
Straturile libere ale senzorilor vor fi aliniate cu câmpul extern. Când câmpul aplicat își schimbă direcția, unghiul dintre stratul liber și stratul fixat se modifică, ceea ce modifică și rezistența elementelor TMR și produce modificări corespunzătoare ale tensiunilor de ieșire.
Ieșirea poate fi configurată pentru a reprezenta funcțiile sinus și cosinus ale câmpului magnetic aplicat senzorului (Fig. 3e). Rezistoarele TMR sunt conectate ca două jumătăți de punte, unul furnizând ieșire sinusoidală și celălalt oferind ieșire cosinus. Fiecare element TMR este caracterizat de o rezistență semnificativă de 1,25 MOhm. Ieșirile sunt proporționale cu tensiunea de alimentare și tensiunea de vârf de ieșire și sunt mult mai ridicate ca nivel decât este posibil cu alte tehnologii de senzori.
Variațiile în spațiul de aer dintre magnet și elementul senzor vor provoca doar mici modificări (abateri) ale semnalului de ieșire, în funcție de dimensiunea și puterea magnetului. Diagrama din fig. 3d arată ieșirea tipică a senzorului în funcție de unghiul câmpului aplicat - folosind un magnet de ferită magnetizat diametral de 12 mm diametru x 4 mm înălțime la o sursă de alimentare de 5 V cu trei goluri de aer diferite.
Noua generație de senzori Hall MMT prin arbore: acoperirea aplicațiilor și creșterea preciziei
Senzorii de proximitate controlați magnetic de la MMT oferă în general nivelul tehnic necesar al sistemului și, prin urmare, prezintă un interes semnificativ pentru clienți, dintre care mulți sunt din industria auto. Dar dezvoltarea senzorilor MMT, informații despre care au fost prezentate, de exemplu, în publicații, este interesantă și din punct de vedere științific și tehnic.
În 2009, specialiștii MMT și-au concentrat eforturile pe dezvoltarea de caracteristici funcționale suplimentare ale senzorilor de poziție creați anterior, dintre care unul este o ieșire cu mai multe ture, precum și îmbunătățirea preciziei dispozitivelor, inclusiv reducerea sensibilității la câmpurile magnetice externe.
Cerințele standard pentru direcția auto, cum ar fi sistemele de control al stabilității ESP, care se așteaptă să fie legiferate în curând în Europa, includ precizia de măsurare a unui senzor de unghi absolut compact cu mai multe ture, de ordinul a 1° sau chiar mai puțin.
Principiile generale ale măsurătorilor cu mai multe ture se bazează pe concept măsurători absoluteîn intervalul de unghi de 360° pentru soluția arborelui traversant (Fig. 4a-b). Conform designului propus, IC-ul care măsoară câmpul magnetic este plasat în vecinătatea unui inel magnetic magnetizat diametral. Componentele câmpului magnetic măsurate în acest caz sunt caracterizate prin forme sinus și cosinus, dar cu amplitudini diferite. Dar prin aplicarea unui parametru de compensare, se poate obține o ieșire precisă pentru senzori de diferite dimensiuni, deși teoretic precizia poate varia.

Orez. 4. Senzori MMT 2009: lucrează pentru a adapta conceptul dezvoltat pentru senzorii volanului și pentru a îmbunătăți precizia:
a, b) conceptul de măsurare a unghiurilor în domeniul de 360°: a) configurație spațială; b) semnale primare sinus-cosinus;
c) un nou concept cu două IP-uri; d, e) două opțiuni de proiectare pentru senzorii volanului cu mai multe ture;
f) prototip de senzor de volan multi-turn cu precizie îmbunătățită
Prototipurile MMT au făcut posibilă obținerea unei neliniarități de mai puțin de ±0,5% din cursa completă în intervalul de temperatură de funcționare de -40... + 150 °C. Pentru a îmbunătăți în continuare acuratețea, este important să îmbunătățim acest parametru și, pentru aceasta, la rândul său, este important să căutați motivele care înrăutățesc liniaritatea. După cum a arătat simularea 2D, erorile în magnetizarea diametrală a magnetului joacă un rol important în obținerea performanței necesare. Permeabilitatea magnetică este mai mare de 1 (1,05-1,25), iar acest parametru nu este precis. Prin urmare, liniile de câmp generate de înfășurare, la traversarea magnetului, se vor abate oarecum de la o linie dreaptă, magnetizarea nu va fi strict diametrală, iar aceasta, la rândul său, va distorsiona formele sinus și cosinus ale componentelor câmpului. Deși unele distorsiuni pot fi luate în considerare în timpul programării, acestea nu pot fi complet compensate: apare o eroare sistematică de precizie.
Pentru a realiza cele mai bune caracteristici MMT a propus următoarea soluție: două circuite integrate, compensate mecanic cu 90° unul față de celălalt (Fig. 4c), fiecare măsoară două componente ale câmpului magnetic (componente tangențiale și radiale). Este justificat din punct de vedere matematic faptul că combinarea semnalelor a două circuite integrate permite, de asemenea, să se calculeze poziția prin calcularea arctangentei semnalelor normale și tangențiale arctan(B t /B n) cu o bună aproximare, iar factorul de control al câștigului pentru fiecare circuit integrat devine neimportant.
Cu această metodă este posibilă o neliniaritate de până la ±0,2<% от полного хода.
Liniile de câmp magnetic generate prin prezența unei constante externe
magnetul sau sursa de curent (firele de curent ridicat, cum ar fi cele utilizate la cablul de pornire al mașinii) sunt o sursă tipică de eroare pentru senzorii care nu au circuite magnetice ecranate.
Know-how-ul MMT include un circuit de ecranare local care reduce efectele câmpului magnetic extern. Soluțiile de acest tip pot reduce, dar nu anula, efectele câmpului de acțiune. Dar specialiștii MMT au propus o nouă metodă de anulare a acestui efect, bazată pe o metodă binecunoscută de anulare a impactului câmpului - o combinație de semnale diferențiale în senzori.
Metoda avută în vedere cu două CI folosește și o combinație de semnale, iar specialiștii companiei au fundamentat matematic că folosind această combinație de semnale, atât eroarea de magnetizare datorată influenței celei de-a treia armonice, cât și efectul unui câmp magnetic extern omogen pot fi simultan compensat, ceea ce se confirmă experimental. Prototipul senzorului a fost plasat în câmpul generat de înfășurare. Chiar și cu un câmp mare de 12 mT (creat de un curent de 1000 A la o distanță de 2,5 cm de elementele sensibile), conform datelor MMT, precizia (precizia este o caracteristică mai complexă, dar specialiștii MMT în raportul lor echivalează în mod evident cu liniaritate) rămâne în intervalul ±1°, ceea ce corespunde la 0,3% din cursa completă.
Rezultatele realizabile cu această metodă depind și de omogenitatea câmpului. Dimensiunile senzorilor sunt mici (diametru - 10-50 mm), ceea ce corespunde unor distante mici intre punctele de masurare (de ordinul catorva mm).
Sursele de câmp sunt situate destul de departe de senzor: de exemplu, cablul de pornire este situat la câteva zeci de mm de carcasa senzorului sau înfășurările unui motor DC fără perii, care generează un câmp omogen pe scara senzorului. .
Conceptul de codificator absolut multi-turn se bazează pe efectuarea acelorași funcții de detectare pentru a produce o ieșire absolută, dar la mai multe ture. Un exemplu clasic este un senzor pentru unghiul de virare a automobilului, a cărui viteză, de exemplu, este de ±2 ture. În plus, această aplicație specifică este un sistem de arbore traversant, în care coloana de direcție trece prin corpul senzorului, reprezentând astfel una dintre aplicațiile cheie pentru conceptul MMT, adaptat și îmbunătățit pentru detectarea unghiulară la 360°.
O soluție MMT pentru sistemele de direcție se bazează pe utilizarea unei transmisii epiciclice cu un senzor de unghi de 360°. Dar, odată cu creșterea intervalului de măsurători unghiulare, influența unei neliniarități tipice de ordinul a ±0,5% din cursa completă dă o eroare care este incompatibilă cu cerințele pentru precizia aplicației (±7,2° pentru ±2 revoluții). Prin urmare, următoarea soluție este utilizarea conceptului de combinație de senzori, care face posibilă îmbunătățirea preciziei de calcul la ±2,9° cu o liniaritate de ±0,2%, dar acest lucru nu este suficient.
Multe soluții cunoscute de la alte companii se bazează pe faptul că un arbore rotativ antrenează două roți dințate cu un număr diferit de dinți (cu cel puțin o unitate). Fiecare angrenaj este conectat la un magnet permanent, a cărui rotație este detectată de un circuit integrat magnetosensible. Acest lucru produce două ieșiri de semnal în formă de dinți de ferăstrău, defazarea dintre care crește odată cu numărul de dinți. Pentru a deduce valoarea absolută a poziției din diferența dintre cele două semnale, se folosește un algoritm special, care are un dezavantaj semnificativ datorită faptului că metoda de scădere matematică este foarte sensibilă la erorile mecanice pentru fiecare senzor. Pentru a obține o precizie ridicată, algoritmul devine semnificativ mai complicat, ceea ce este implementat în circuitul de procesare a semnalului senzorului.
Prin urmare, MMT revine la o altă soluție cunoscută, dar folosind propriul concept. Următoarea idee a MMT este de a oferi o ieșire dublă prin combinarea a doi senzori de unghi de 360° cu un sistem de angrenaj (Fig. 4d-e). Unul dintre senzori este binecunoscuta soluție MMT 360° și oferă o ieșire precisă într-o singură rotație, celălalt este o transmisie de viteză în afara arborelui cu un raport de transmisie pe o gamă de rotații în funcție de caracteristicile sistemului de direcție. Ieșirea senzorului este de asemenea absolută, dar cu o precizie mai grosieră. Rolul acestui semnal este de a indica rotațiile reale, iar semnalul exact indică poziția în cadrul revoluției curente.
Cel de-al doilea senzor poate fi de diferite tipuri, inclusiv o versiune de capăt cu un magnet montat pe arbore și cu un unghi de rotație IC.
Următorii pași ai companiei sunt aplicarea soluției dezvoltate (Fig. 4e), adaptând-o pentru aplicațiile de detectare a unghiului volanului pentru ESP sau poziția arborelui motorului electric. Următorul pas în implementarea unei soluții multi-turn este integrarea cu un senzor de cuplu pentru a implementa toate funcțiile combinate necesare în sistemele de direcție, creând un dispozitiv multi-turn mai simplu, mai fiabil, fără contact.
Odată dezvoltat, conceptul original a devenit relevant și pentru senzorii liniari, deoarece banda magnetică nu este altceva decât un cerc cu o rază infinit de mare, și pentru aplicații cu un interval unghiular limitat și datorită dependenței de temperatură (senzori Hall).
Un senzor liniar poate fi utilizat, de exemplu, pentru a detecta poziția selectorului de viteze (PRNDL) într-o mașină cu transmisie automată sau pentru a monitoriza poziția ambreiajului, supapei EGR, poziția pedalei. În aceste aplicații, mișcarea obiectului este de ordinul 15-20 mm, dar pot fi detectate mișcări liniare mari (>100 mm).
O altă posibilitate este utilizarea componentelor axiale și tangenţiale, dar aceasta nu mai este o dezvoltare originală a companiei, ci mai degrabă o schemă clasică, pentru care, atunci când se realizează nu cu un dipol, ci cu un magnet multipolar, putem recomanda , de exemplu, următorul dispozitiv discutat în acest articol 2009 al anului - encoder AS5311 Austriamicrosystems.
În ambele cazuri, toleranțele pentru deplasările radiale, tangențiale și axiale pot fi destul de mari: datorită faptului că senzorul este sensibil nu la amplitudine, ci la direcția câmpului magnetic, ci la distorsiunile direcționale și la influența zgomotului. poate afecta precizia, metoda de combinare a semnalelor este aplicabilă în ambele cazuri.
Dacă doar o mică parte a magnetului inel este utilizată pentru a măsura un unghi de până la 360° (aproximativ 50-90°), de exemplu, în senzorul schimbătorului de viteze, senzorul de combustibil, senzorii supapei EGR, atunci MMT ia în considerare două soluții posibile pentru un astfel de senzor:
- utilizarea unui magnet magnetizat diametral;
- utilizarea unui magnet magnetizat sinusoidal.
Prima soluție este mai simplă, a doua, conform simularii software, este mai precisă.
Astfel, pe baza soluției sale patentate, MMT a creat o întreagă generație de senzori noi pentru sisteme de arbore transversal.
Encoder AS5311 Austriamicrosystems - Hall IC pentru detectarea mișcării în afara axei liniară și unghiulară a magnetului multipolar
AS5311 (Fig. 5) este un alt nou CI cu un singur cip, complet integrat, care, la fel ca toți predecesorii din familia de senzori Austriamicrosystems, este un encoder rotativ Hall magnetic, dar adaptat să funcționeze nu cu un dipol, ci cu un multi-poli. magnet.

Orez. 5. Encoder Austriamicrosystems AS5311 - nou Hall IC pentru liniar și unghiular
Detectarea mișcării în afara axei a magnetului multipolar:
a) modul de operare pentru care a fost dezvoltat SI;
b) schema functionala a senzorului; c, d) moduri de operare unghiulare alternative cu magnet inel multipolar;
e) diagrame ale semnalelor de ieșire la deplasarea părții mecanice a rotorului
IC include elemente Hall integrate pentru măsurarea mișcării liniare sau unghiulare folosind benzi sau inele magnetice multipolare. CI a fost dezvoltat ca detector liniar al unei benzi magnetice multipolare, dar datorită faptului că rigla este un cerc cu o rază infinit de mare, acest encoder poate fi recomandat și pentru detectarea unghiulară a unei benzi magnetice multipolare cu o rază suficient de mare. (Fig. 5a-d). AS5311 IC, ca și senzorii MMT, este, de asemenea, destinat aplicațiilor în sisteme în care senzorul nu poate fi montat pe capătul arborelui - în așa-numitul arbore tubular sau sisteme de arbore traversant. În loc de versiunea finală, AS5311 poate fi montat în așa-numita versiune Off-Axis, adică nu direct opus centrului magnetului rotativ, care este și centrul arborelui, ci opus secvenței polilor magnetului, decalaj față de centrul geometric față de margine. În ceea ce privește centrul și axa de rotație a arborelui, este permisă amplasarea atât radială, cât și axială a polilor în jurul periferiei magnetului.
Una dintre ieșirile IC (Fig. 5e) este incrementală în cuadratura cu un număr de impulsuri de 256 pe perioadă polară (poli nord și sud) ale unui rotor magnetic care se mișcă cu o viteză de 0,65 m/s. Rezoluția incrementală de ieșire este de 1,95 µm pe pas. De asemenea, pentru fiecare pereche de poli, un singur impuls index este generat la ieșirea index a circuitului integrat.
În plus față de aceste tipuri de ieșiri standard, este disponibilă și o ieșire digitală prin furnizarea de informații de poziție absolută pe 12 biți într-o pereche de poli, rezultând o rezoluție de aproximativ 0,5 µm într-un interval de 0-2 mm.
Ieșirea absolută este disponibilă prin interfață serială sau PWM.
Lungimea perechii de poli magnetici este de 2,0 mm (1,0 mm fiecare pentru polii nord și sud). Lungimea celorlalți poli va induce neliniaritate semnificativă, crescând aproape proporțional cu abaterea lungimii. Banda magnetică trebuie plasată deasupra IC la o distanță de aproximativ 0,3 mm, variațiile permise sunt de 0,3-0,6 mm, deoarece IC are un ACU încorporat. Precizia va depinde de lungimea și rezistența fiecărui pol și deci de precizia mijloacelor de magnetizare și de omogenitatea materialului magnetic.
Pentru a monitoriza poziția magnetului deasupra circuitului integrat, sunt utilizați indicatori de biți de „culoare” variabilă în intervalul „roșu-galben-verde”.
În practică, monitorizarea se realizează după cum urmează. Indicatorii de semnal pentru creșterea și scăderea intensității câmpului magnetic MagINCn și MagDECn sunt disponibili pe pinii hardware ai circuitului integrat, iar biții de stare sunt disponibili în fluxul de biți serial. În plus, un bit de stare LIN egal cu unu indică un interval „roșu” nerecomandat al câmpului. Registrul MAGnitude oferă informații suplimentare despre intensitatea câmpului magnetic.
AS5311 este oferit într-un pachet TSSOP cu 20 de pini și este proiectat să funcționeze la temperaturi ambientale de -40...+125°C.
Regulatorul de tensiune intern permite AS5311 să funcționeze de la una dintre cele două tensiuni de alimentare conform aplicației IC - 3, 3 sau 5 V.
- feedback cu microactuatori;
- feedback de la servo-uri;
- robotică;
- înlocuirea codificatoarelor optice în orice sistem.
Cei mai buni senzori de mișcare din 2009 conform experților din revista Senzori
Următorii senzori de mișcare și componente au primit premiile „Best of Sensors Expo” la evenimentul global Sensors Expo & Conference desfășurat în iunie la categoriile Senzori și Componente pentru senzori:
- Senzorul miniatural 6-DOF 6DX DTS, care poate măsura intervale unghiulare de ordinul a 50.000°/s și accelerații de până la 6000 g, este „aur” în categoria Senzori.
- Sistem miniatural pentru determinarea pozitiei si a cursului fata de topoarele pământului Sistemul de referință pentru atitudine și direcție (AHRS) SBG Systems IG-500N, inclusiv un receptor GPS și un senzor barometric - „aur” în categoria Senzori.
- Componenta miniaturală AHRS 3DM-GX3-25 MicroStrain este „argintie” în categoria Componente senzor.
- Premii de bronz la categoria Senzori: Kionix Inc. KXTF9 - Accelerometru MEMS cu trei axe cu funcționalitate Directional Tap/Duble-Tap, giroscop MEMS robust Silicon Sensor Systems
CRS09, CMA 3000 VTI Technologies Inc. - accelerometru MEMS de putere redusa, montat pe substraturile clientului si eliminand necesitatea ambalajului extern.
În conformitate cu logica articolului, alți senzori premiați care nu pot fi clasificați ca un grup separat în titlu, precum și sistemele și instrumentele de măsurare premiate în alte categorii, nu sunt incluși în această recenzie și listă.
Pentru informațiile cititorilor, nodul senzorului wireless de mare viteză HS-LINK de la MicroStrain și PowerCast Corp. au primit premii de aur la categoria Produs de achiziție de date. P2100 Powerharvester este un modul de colectare a energiei care convertește energia RF disponibilă ( telefoane mobile, TV și alte dispozitive) într-o tensiune constantă stocată într-un condensator.
Pe lângă 3DM-GX3-25 MicroStrain, următoarele companii au primit premii de argint:
- Infinite Power Solutions Inc. - în categoria Senzori pentru dispozitivul de stocare a energiei micro-putere INFINERGY Micro Power Module, caracterizat prin prezența unei electronice de control eficiente încorporate și absența aproape completă a pierderilor în timpul stocării energiei;
- Testare și măsurare HBM-LDS - în categoria Produse de achiziție de date pentru înregistratorul portabil de tranzitori de mare viteză GEN5i;
- Moog Inc. - in categoria Senzori pentru noul detector de bule de aer in lichid LifeGuard IQ.
Pe lângă Kionix, accelerometrele VTI și giroscopul SSS, Cymbet Corp. a primit un premiu de bronz. pentru modulul de colectare a energiei EnerChip EH (CBC500 și EVAL-08) bazat pe baterii cu peliculă subțire cu funcții de control. Mențiuni de onoare la categoria Senzori au revenit accelerometrului de accident 7264G al Endevco Corp., senzorului digital de presiune barometrică T5300 de la EPCOS Inc. Şi senzor capacitiv nivel CLC Sensortechnics Inc, precum și un dispozitiv de achiziție de date Wi-Fi de la National Instruments.
„Cei mai buni” senzori de mișcare din 2009 - Componente multi-senzoare
Sisteme tehnice diversificate 6DX
6DX Diversified Technical Systems, Inc. (DTS) (Fig. 6) este o nouă completare la gama de senzori e-SENSING, care este o componentă în miniatură care include 3 accelerometre liniare și 3 senzori de viteză unghiulară într-un pachet compact și robust, conceput pentru măsurarea accelerațiilor mari și unghiulare. viteze în toate cele trei axe. Dimensiuni carcasa senzorului - 28x28x16,5 mm, greutate 26 g.

Orez. 6. Nouă componentă multisenzor miniaturală pentru măsurători inerțiale
cu 6 grade de libertate și raze mari de detecție
Cele 6 canale de intrare ale lui 6DX oferă datele necesare pentru a calcula vectorii de accelerație și orientarea urmăririi în spațiul 3D. Post-procesarea computațională adecvată permite reprezentarea mișcării cinematice în timp. Unitatea este proiectată să reziste la sarcini mari de șoc - până la 6000 g, iar această valoare nu determină impactul de vârf, care nu poate fi depășit, ci mai degrabă accelerația maximă detectabilă.
Accelerometrele liniare integrate sunt dispozitive piezoresistive cu punte completă sensibile la intrarea în curent continuu (DC). Pentru conformitate aplicatii diverse Sunt posibile intervale de detectare de la ±20 la 6000 g. Tensiunea de intrare a accelerometrului triaxial este de 2-10 V. Linearitatea tipică de ieșire a accelerometrului<1% от полного выходного диапазона в ±200 мВ, поперечная чувствительность акселерометра ±3%.
Senzorii de viteză unghiulară integrați sunt disponibili în intervale de la ±300 la 50.000°/s și oferă, de asemenea, răspuns DC. Tensiunea de intrare a unui giroscop cu trei axe este de 4,9-14V Liniaritatea de ieșire tipică a giroscopului este de asemenea<1% от полного выходного диапазона, но составляющего ±2 В; производителем специфицирован дрейф гироскопа 0, 1°/с.
Ieșirea senzorului poate fi înregistrată folosind orice sistem standard de achiziție de date. Microconectorii încorporați cu 16 pini pentru fiecare dintre senzorii cu trei axe permit înlocuirea ușoară a cablului.
Aplicațiile dispozitivelor includ autovehicule și aerospațiale, cum ar fi testarea vehiculelor, testele de impact, măsurătorile vibrațiilor, precum și aplicațiile de uz general legate de mișcarea unghiulară, șocurile, măsurarea vibrațiilor.
SBG Systems SAS IG-500N
SBG Systems SAS IG-500N (Fig. 7) este un nou sistem de navigație în miniatură pentru determinarea Sistemului de referință a direcției de atitudine (AHRS), care include o unitate de măsurare inerțială MEMS IMU cu un receptor GPS suplimentar de 4 Hz și un senzor barometric, cântărind doar 8 g pentru OEM și 45 g în cutie. IG-500N este o combinație de 13 senzori - accelerometre, giroscoape, magnetometre, trei senzori de temperatură, un senzor de presiune și un receptor GPS.

Orez. 7. SAS IG-500N - noul sistem AHRS de navigație inerțială în miniatură înalt integrat al SBG Systems
Domenii de măsurare a vitezelor unghiulare - până la 500°/s, accelerații - ±5 g (disponibile versiuni de 2 și 18 g), câmpuri magnetice ±0,12 mT. Presiunea este măsurată cu o rezoluție de 6 Pa și o precizie de ±50 Pa (măsurători relative) și ±200 Pa pentru măsurători absolute, cu o rată de actualizare de 9 Hz.
Dispozitivul include și un filtru Kalman. Toate acestea vă permit să măsurați orientarea, viteza și poziția 3D chiar și în medii foarte dinamice - cu rata de intrare de modificare a fiecărui parametru de până la 100 Hz.
Formatele de ieșire includ unghiuri Euler (definirea poziției corpului/sistemului de coordonate al corpului în sistemul de coordonate de referință: unghiuri de precesie, nutație, rotație adecvată), cuaternioni (un sistem de numere în spațiul 4-dimensional), matrice, 3D viteza, poziția 3D, datele senzorilor calibrați, datele de atingere a șirului. Fiecare ieșire poate fi activată sau dezactivată de către utilizator.
Principalele protocoale de comunicare sunt RS-232 și USB, precum și TTL.
Rata de transfer de date în serie - 9600-921600 bps, selectabilă de utilizator.
Pentru a îmbunătăți performanța, dispozitivul este calibrat individual pentru a reduce offset-ul și a câștiga erorile pe întregul interval de temperatură. Circuitul controlează efectele sensibilității laterale a accelerometrelor și efectul lipsei de aliniere a giroscoapelor. SBG Systems a dezvoltat, de asemenea, un sistem de calibrare a câmpului magnetic, care mărește și precizia măsurătorilor.
IG-500N este proiectat pentru a înlocui giroscoapele cu fibră optică (FOG). La măsurarea poziției față de axele pământului, senzorii IG-500N oferă o indicație a eliminării accelerațiilor tranzitorii, ceea ce este important în timpul manevrelor cu niveluri g ridicate, cum ar fi la viraj. Chiar și la accelerațiile mari care pun probleme pentru AHRS-urile tipice, măsurătorile de poziție/orientare cu IG-500N pot fi efectuate cu o precizie susținută de producător mai bună de 1°.
Este posibilă utilizarea sistemelor radio GPS sau Doppler externe, ceea ce permite utilizarea dispozitivului în sisteme de navigație inerțială.
Interval de temperatură de funcționare: -40... +85 °C. Tensiunea de alimentare de funcționare este de 3,3-12 V. Dispozitivul este de putere redusă (475 mW).
Ora de pornire<10 с, но оптимальное время для сбора данных - через 10 мин после включения.
Lista generală a aplicațiilor dispozitivului include:
- transport navigatie;
- analiza mișcării mașinii;
- înlocuirea AHRS de înaltă performanță;
- stabilizarea platformei;
- reglarea fină a poziționării antenelor și camerelor;
- tragere fara suporturi;
- monitorizarea poziţiei personalului.
3DM-GX3-25 MicroStrain
3DM-GX3-25 MicroStrain (Fig. 8) este următorul sistem AHRS în miniatură (cu o greutate de 11,5 g în versiunea OEM), care folosește și tehnologia MEMS și combină 12 senzori: accelerometru cu trei axe, giroscop cu trei axe, trei axe a magnetometru, trei senzori de temperatură și un procesor de bord care funcționează pe baza algoritmilor de fuziune a datelor senzorilor - pentru orientare statică și dinamică și măsurători inerțiale.

Orez. 8. Versiunea OEM a sistemului AHRS miniatural MicroStrain 3DM-GX3-25
Sistemul oferă ieșiri calibrate și compensate cu temperatură în următoarele formate: accelerație, viteză unghiulară, câmp magnetic, vectori unghi și viteză deltaAngle și deltaVelocity, unghiuri Euler, matrice de rotație.
Toți parametrii sunt compensați cu temperatură și legați la un sistem de coordonate ortogonal (cartezian).
Comunicarea 3DM-GX3-25 AHRS se realizează prin interfețe RS-232, USB 2.0 și TTL.
Ieșirea poate include calcule de orientare: înclinare, rostogolire, îndreptare, rotire sau o matrice de rotație.
Domenii unghiulare de detectare a orientării - 360° de-a lungul tuturor axelor (matrice de orientare, cuaternioni); ±70° pentru înclinare, ±180° pentru rostogolire și îndreptare (unghiuri euleriene).
Intervalul standard de accelerație este de ±5 g, iar intervalele de ±2 g, ±18 g, ±50 g sunt, de asemenea, disponibile. Gama standard de viteze unghiulare ±300°/s; sunt posibile intervale de ±1200°/s, ±600°/s, ±150°/s, ±75°/s. Domeniul magnetometrului este de ±0,25 mT. Precizia măsurării orientării este specificată de producător ca ±0,5° pentru condiții statice și ±2,0° pentru condiții dinamice. Neliniaritatea ieșirilor accelerometrului și giroscopului este determinată a fi de 0,2%, magnetometrul - 0,4<%.
Pe lângă compensarea completă a temperaturii pentru compensarea și sensibilitatea tuturor celor 9 senzori, fiecare dispozitiv cu senzor este calibrat individual pentru a compensa sensibilitatea accelerației giroscopului, neliniaritatea giroscopului și dezalinierea senzorului.
Performanța îmbunătățită a dispozitivului în medii cu vibrații este obținută prin eșantionarea de 30 kHz, filtrarea digitală și algoritmii de compensare coning/sculling pentru integrarea de 1 kHz și ieșirea deltaAngle și deltaVelocity. AHRS 3DM-GX3-25 este un sistem de operare rapid cu viteze de ieșire selectabile de utilizator de până la 1 kHz.
3DM-GX3-25 AHRS vine cu programe de calibrare pentru a lua în considerare efectele câmpurilor magnetice. Inginerilor li se oferă un kit de dezvoltare.
Unitatea standard este alimentată de la 4,4-6,0 VDC și are un consum de putere/curent de 80 mA la 5 V. OEM necesită o tensiune de alimentare reglată în intervalul 3,2-5,5 V, consumând de asemenea un curent de 80 mA la 5 V. .
Interval de temperatură de funcționare: -40... +75 °C.
3DM-GX3-25 AHRS este proiectat pentru următoarele aplicații:
- transport navigatie;
- stabilizarea platformei;
- biomecanică;
- inerțial purtabil
- sisteme de urmărire;
- Supravegherea forajelor;
- determinarea locației în spațiu.
Cele mai bune componente ale senzorului de mișcare MEMS din 2009 (accelerometre și giroscoape)
Kionix Inc. KXTF9
Kionix Inc. KXTF9 (Fig. 9) este un nou accelerometru cu trei axe, cu funcționalitate unică, proiectat pentru telefoane mobile și dispozitive mobile de internet, periferice de computer, echipamente sportive și navigație personală.

Orez. 9. Noul accelerometru KXTF9 cu 3 axe cu atingere direcțională/apăsare dublă pentru o experiență intuitivă a utilizatorului
Anterior, în 2008, Frost & Sullivan a premiat accelerometrul Kionix KXSC7, caracterizat printr-un factor de formă mic de 3x3x0,9 mm și un curent de funcționare scăzut de 230 μA sau mai puțin. Noul Kionix Inc. are același factor de formă de 3x3x0,9 mm. KXTF9 este un accelerometru MEMS cu trei axe cu interfață I 2 C, distins cu un premiu de bronz la Sensors Expo 2009, compatibil pin-la-pin cu accelerometrele cu trei axe din seria KXTE9 (I 2 C), KXSD9 (IIC, SPI) . În familia mare de accelerometre oferite de Kionix, aproape toate accelerometrele sunt acum cu trei axe, singura excepție fiind senzorii X analogici KXD94-7044 și KXD94-7138 din carcase standard DFN cu dimensiuni de 5x5x1,2 mm. Dimensiunile reduse ale carcaselor LGA de 3x5x0,9 mm sunt un semn distinctiv al serilor KXPS5 și KXRB5.
Noul element senzor de înaltă performanță al noului KXTF9 este fabricat din siliciu cu un singur cip folosind un proces Deep Reactive Ion Etching (DRIE) și este protejat de un capac de silicon sigilat. Senzorul funcționează folosind principiul dezechilibrării capacității diferențiale și anulării offsetului pentru a reduce erorile datorate procesului de fabricație și influențelor mediului. ASIC detectează și traduce modificări capacitive într-o tensiune analogică proporțională cu accelerația, iar apoi comunicarea se realizează printr-o interfață standard I2C.
Dar ceea ce diferențiază accelerometrul cu trei axe al KXTF9 de multe dispozitive standard este caracteristica sa unică Directional Tap/Double-Tap, o inovație Kionix de vârf care permite îmbunătățiri semnificative ale interfeței cu utilizatorul de detectare a mișcării. Semnul de detectare KXTF9 Detectarea direcțională a atingerii / atingerii duble (apăsare - lovituri ușoare, atingere) detectează intrarea cu o singură atingere și intrarea dublă (apăsare dublă), oferă informații despre axa de accelerație și direcția fiecărui efect de atingere, permițând până la 12 utilizatori. comenzi funcționale definite
Atingerea direcțională/Atingerea dublă KXTF9 este declanșată prin detectarea fie a unei atingeri rapide, fie a unei atingeri duble pe oricare dintre cele 6 suprafețe ale obiectului (±X, ±Y, ±Z). Algoritmul încorporat permite accelerometrului să evidențieze loviturile simple și duble și direcția acestora. Utilizatorii pot folosi aceste 12 bătăi simple/duble ca comenzi pentru a-și crea propria experiență de utilizator unică, inovatoare, puternică și intuitivă. ASIC KXTF9 are un algoritm încorporat care vă permite să creați 12 comenzi activate prin atingere pentru a implementa orice funcție de utilizator. De exemplu, o singură atingere pe suprafața telefonului poate declanșa mesageria vocală, în timp ce o dublă atingere pe suprafața din spate poate activa accesul la Internet. Această caracteristică este complet programabilă.
Un algoritm încorporat raportează modificările în mișcarea dispozitivului, permițând detectarea mișcării (algoritm activ) sau fără detectarea mișcării (algoritm inactiv). Senzorul acceptă detectarea orientării și algoritmi de întrerupere. Funcția de detectare a orientării oferă informații despre, de exemplu, condițiile de peisaj și portret.
KXTF9 este alimentat la 1,8-3,6 V DC și are o interfață de ieșire standard I 2 C.
Design-ul KXTF9 oferă capabilități de programare de utilizator suficiente pentru a adapta dispozitivul la o gamă largă de aplicații: rata de date de ieșire programabilă de utilizator (ODR) cu ADC la rate de eșantionare definite de utilizator, rezoluție de 8 sau 12 biți selectabilă de utilizator, digitală filtru trece-înalt cu frecvență de tăiere selectabilă. Intervalul de accelerație poate fi selectat de utilizator din următoarele valori standard ale intervalului: ±2, 0, ±4, 0, ±8, 0 g. Interval de temperatură de funcționare: -40... +85 °C.
Giroscop cu zgomot redus CRS09 Silicon Sensing Systems
Giroscopul cu zgomot redus CRS09 Silicon Sensing Systems (Fig. 10) are performanțe de vârf în clasă, stabilitate la temperatură și capacitatea de a selecta două intervale de detecție cu caracteristici diferite: ±200°/s (CRS09-01 și CRS09-11) și ±100°/s s (CRS09-02, CRS09-12). Designul giroscopului MEMS din silicon este combinat cu electronice discrete pentru a asigura performanțe ridicate. Zgomotul redus (valoarea pătrată medie rădăcină 0,03°/s rms în banda de frecvență 3-30 Hz) și stabilitatea ridicată permit producătorului să recomande această componentă pentru înlocuirea giroscoapelor cu fibră optică (FOG). Neliniaritate<±0, 1% полной шкалы, поперечная чувствительность - менее 2%.

Orez. 10. Giroscop CRS09 Sisteme de detectare a siliconului
Variațiile de temperatură sunt specificate la ±1% maxim și sunt pentru compensare< ±3°/с (CRS09-01 и CRS09-02) и < ±1°/с (CRS09-11 и CRS09-12). Рабочий температурный диапазон: -40... +85 °C.
Tensiune de alimentare - 4,75-5,25 V. Ieșire - analogică (nu ratiometrică). Timpul de activare după pornire (pornire) este mai mic de 0,5 s.
Aplicațiile includ stabilizarea în buclă închisă, instrumentarea de precizie a aeronavei
(AHRS) și altele, în care zgomotul redus este una dintre cerințele cheie.
Datele privind temperatura inelului de siliciu și frecvența vibrațiilor sunt furnizate ca ieșiri suplimentare, permițând o caracterizare mai precisă a senzorului atunci când este încorporat într-un circuit client.
CMA3000
CMA3000 (Figura 11) este noul accelerometru cu trei axe al VTI, conceput pentru detectarea și monitorizarea mișcării în dispozitive portabile de electronice de larg consum, cum ar fi telefoane mobile, dispozitive de jocuri, electronice sportive și altele. La începutul anului 2009, în timpul căruia era planificată producția în masă a dispozitivelor, compania a introdus acest accelerometru ca fiind cel mai mic și cel mai puțin consumator de energie accelerometru cu trei axe dintre analogii cunoscuți din lume. Dimensiunile sale sunt 2x2x0,95 mm.

Orez. 11. CMA 3000 - accelerometru VTI cu trei axe bazat pe tehnologia Chip-on-MEMS (CoM)
Consum de curent - până la 10 µA la o frecvență de eșantionare de 40 Hz, cu o tensiune de alimentare de 1,7-3,6 V.
Caracteristicile comune ale accelerometrelor din seria CMA3000 includ intervalele personalizabile de 2 g și 8 g, rezistența la șocuri și compatibilitatea RoHS.
CMA3000-D01 cu interfețe digitale SPI și I^2C sunt optimizate pentru sisteme de putere redusă (7-70 µA). Accelerometrele sunt, de asemenea, caracterizate printr-o frecvență de răspuns selectabilă de utilizator. Semnalele de întrerupere pot fi declanșate de informații despre disponibilitatea datelor, mișcare și cădere liberă.
CMA3000-A01 oferă trei ieșiri analogice ratiometrice continue pentru integrarea în sistemele ADC. Consumul de curent al acestor senzori este de 180 µA.
CMA3000 are un nou concept de ambalare pentru acest senzor, numit Chip-on-MEMS (CoM). MEMS și ASIC sunt fabricate pe substraturi separate, iar apoi, conform conceptului Chip-on-MEMS, cipurile ASIC (chip-uri flip) sunt plasate deasupra substratului MEMS. Straturile sunt atașate la substratul MEMS pentru redistribuire și izolare, precum și pentru interconectare externă, înainte ca ASIC-ul să fie adăugat la MEMS și, prin urmare, cipurile ASIC sunt izolate printr-un strat de pasivare.
Pinul 1 este marcat în mod obișnuit.
Tehnologia CoM oferă următoarele caracteristici: inductanță redusă a plumbului, dimensiune mică a cipurilor și a carcasei, cu o grosime a profilului mai mică de 1 mm, greutate redusă, fabricabilitate pentru lipire automată (dispozitive de montare la suprafață).
Nu este necesar un ambalaj suplimentar. Componentele CMA3000 trebuie plasate pe placă sau alte substraturi personalizate (cum ar fi ceramica) în funcție de geometria lor și lipite. În acest caz, se recomandă poziționarea automată a componentelor.
Sunt oferite mostre și plăci cu dispozitive pentru prototipare.
Accelerometru de blocare 7264G Endevco
Accelerometrul de blocare 7264G al Endevco este un alt dispozitiv de ultimă generație care reflectă eforturile companiei de a îmbunătăți dispozitivele la nivelul structurii senzorilor. Senzorul 7264G măsoară nivelurile g în timpul impactului puternic de ordinul a 2000 g folosind o nouă structură MEMS care prezintă o robustețe sporită (rezistență la impact de până la 10.000 g în fiecare dintre cele trei axe) pentru a atenua atenuarea rezonanței fără schimbare semnificativă de fază. 7264G este destinat aplicațiilor de intrare în frecvență în care precizia măsurării poate fi îmbunătățită cu noul dispozitiv.
Concluzie
Într-un articol, ca de obicei, este imposibil să vorbim despre toate noile oferte de componente, actualizări ale liniilor producătorilor de top de senzori de mișcare, confirmând tendințele de dezvoltare ale acestui segment de piață semnificativ și voluminos.
Acest lucru probabil nu este necesar - datorită faptului că acest segment de piață este în continuă evoluție, se poate presupune că următoarea generație de senzori - 2010 - se va caracteriza printr-o funcționalitate și mai mare, niveluri mai ridicate de integrare a caracteristicilor funcționale - ambii senzori de poziție /encodere si MEMS -componente, precizie mai mare, fiabilitate, pret optim.
Lista companiilor si site-urilor web:
NVE Corporation - ,
Cipurile logice controlate magnetic sunt utilizate în dispozitive pentru o mare varietate de scopuri. În prezent, senzorii magnetici universali de poziție și deplasare sunt cei mai folosiți. Designul senzorilor poate fi diferit, dar conțin întotdeauna un traductor de câmp magnetic și un sistem magnetic, deschis sau închis. Sistemul magnetic poate fi o parte integrantă a senzorului sau poate include anumite elemente ale obiectului controlat. Cel mai simplu senzor constă dintr-un microcircuit controlat magnetic (MCMC) și un magnet permanent montat pe o legătură mobilă a obiectului controlat. Când magnetul și MUMS se apropie de o anumită distanță, inducția câmpului magnetic devine suficientă pentru a declanșa microcircuitul. Scoaterea magnetului face ca acesta să treacă la starea inițială.
La dezvoltarea senzorilor se iau în considerare modelele cunoscute ale acțiunii câmpului magnetic, caracteristicile magneților permanenți, precum și influența elementelor structurale asupra parametrilor senzorilor. Senzorii magnetici sunt utilizați în tastaturi fără contact, motoare cu supape, dispozitive automate de protecție a rețelei, relee și siguranțe electronice, contoare de frecvență și direcție de rotație a arborelui, convertoare de unghi de rotație, sisteme de automatizare industriale, auto și de uz casnic, casetofone pentru autostopul și playere electrice, etc. Senzori similari cu un obturator cilindric rotativ sunt utilizați în întrerupătoarele fără contact ale sistemului de aprindere electronică a mașinilor. Un astfel de întrerupător are fiabilitate operațională și durabilitate ridicate.
Dacă mai multe rânduri de ferestre sunt plasate pe perdea într-o ordine corespunzătoare codului Gray, atunci folosind numărul adecvat de MUMS și magneți, este posibil să implementați un senzor de deplasare liniară de 5-8 biți sau un „cod de viteză de rotație”. ” senzor. Spre deosebire de un senzor de lumină, un senzor magnetic nu necesită un sistem optic complex și este mai fiabil și mai economic.
Dispozitive de blocare electromecanice interesante pot fi realizate pe baza unui senzor magnetic. Pe fata cilindrica a broastei este atasat un magnet, astfel incat atunci cand este rotit cu o cheie, magnetul se apropie de MUMS fixat langa acesta. Unitatea electronică care primește semnalul de la microcircuit efectuează comutarea necesară. Comutatoarele de aprindere auto care funcționează pe acest principiu sunt convenabile și foarte fiabile.
Utilizarea MUMS ca senzori de poziție a rotorului pentru motoarele electrice de tip supapă (fără perii) a devenit larg răspândită. Cel mai adesea, senzorul de poziție a rotorului este un inel staționar din material nemagnetic, pe care sunt instalate uniform 2, 3 sau 4 MUMS în jurul circumferinței (în funcție de numărul de secțiuni ale înfășurării câmpului). Microcircuitele cad în golurile unui sistem de magneți de control care se rotesc cu arborele. Rotorul motorului electric este un magnet permanent cu mai mulți poli, iar înfășurarea câmpului cu mai multe secțiuni joacă rolul unui stator. Câmpul magnetic rotativ al înfășurărilor de câmp este format de un comutator fără contact conform comenzilor de la senzorul de poziție a rotorului. În acest caz, un microcircuit controlează, de regulă, una dintre secțiunile înfășurării de excitație. Utilizarea MUMS într-un senzor de poziție a rotorului face posibilă controlul vitezei de rotație a motoarelor electrice fără perii într-o gamă foarte largă - de la câteva rotații pe minut la 60.000. Astfel de motoare sunt foarte promițătoare pentru acționarea directă a playerelor electrice și a casetofonelor. deoarece au o durată de viață lungă (până la 10.000 de ore), compacte și silentioase; randamentul lor ajunge la 70%.
Releele electronice fără contact au fost create folosind MUMS. Sistemul magnetic și înfășurarea unui astfel de releu sunt în principiu aceleași cu cele ale unuia electromagnetic convențional, dar armătura și contactele asociate cu acesta sunt absente. Ele sunt înlocuite cu un microcircuit instalat în golul circuitului magnetic și un amplificator de curent cu tranzistor. Unitatea executivă a releului, realizată din tranzistoare sau tiristoare puternice, poate fi proiectată pentru un curent (sau tensiune) comutat mare. În același timp, dimensiunea releului rămâne relativ mică.
Dispozitive similare pot fi folosite pentru a proteja electronic circuitele de alimentare ale echipamentelor de suprasarcini si scurtcircuite. Dacă este necesară protejarea circuitelor de curent înalt (până la 1000 A), în jurul firului circuitului controlat este plasat un concentrator inel din oțel pentru transformator. MUMC este plasat în golul concentratorului. Depășirea curentului prin conductorul controlat peste pragul setat duce la comutarea microcircuitului și la funcționarea actuatorului. Avantajele unor astfel de dispozitive relee sunt izolarea completă a circuitelor de control și executive, viteză mare (zecimi de microsecundă) și siguranță intrinsecă.
Pe baza MUMS, este posibil să se producă modele convenabile și fiabile ale elementelor de control. Deplasarea mânerului dispozitivului, în baza căruia este montat un magnet permanent, într-una dintre pozițiile extreme duce la comutarea microcircuitului corespunzător și la transmiterea comenzii corespunzătoare.
Trebuie remarcat faptul că MUMS poate fi utilizat în multe cazuri în care sunt utilizate întrerupătoare cu lame. Cu toate acestea, în comparație cu comutatoarele cu lame, microcircuitele controlate magnetic au dimensiuni mai mici, au rezistență mecanică și stabilitate mai mari, nu au contact la comutare și sunt de 10 ori mai rapide și mai fiabile.
Oportunități interesante sunt oferite de utilizarea MUMS în detectarea defectelor. Ca exemplu, putem lua în considerare proiectarea unui cap pentru un detector de fire rupte într-o frânghie. Aceste dispozitive sunt foarte necesare pentru mineri, constructori, operatori de telecabine, ascensoare etc. Principiul funcționării lor se bazează pe înregistrarea câmpului magnetic rătăcit care apare în jurul frânghiei. Inducerea câmpului rătăcit de-a lungul frânghiei este relativ mică - aproximativ 15 mT. Prin urmare, sensibilitatea capului este crescută prin introducerea unui concentrator magnetic în sistem. Este format din două inele cu suprafețele teșite spre interior, iar MUMS sunt plasate în golul dintre ele. Decalajul este determinat de grosimea cipului și ar trebui să fie cât mai mic posibil. Pentru a instala un concentrator pe o frânghie, inelele de concentrare sunt detașabile (fiecare constând din două jumătăți de inele). Câmpul creat de sistemul magnetic magnetizează secțiunea controlată a frânghiei dintre poli. În absența unui defect de frânghie, în această zonă apare un câmp uniform de împrăștiere. Când mutați capul de-a lungul unei astfel de frânghii, MUMS nu comută. Când firele din cablu se rup, are loc o deformare a câmpului magnetic parazit, pe care microcircuitul o înregistrează, iar nivelul tensiunii la ieșire se modifică. Capul poate fi setat să se declanșeze atunci când un anumit număr de fire este rupt și la o anumită adâncime. Sensibilitatea sa aproape că nu depinde de viteza de mișcare a capului de-a lungul frânghiei, ceea ce vă permite să-l verificați în timpul mișcării și să opriți capul găsitorului în locul în care este detectat un defect.
Principalele avantaje ale microcircuitelor controlate magnetic în comparație cu alte convertoare de cantități fizice (neelectrice) sunt simplitatea furnizării aproape ideale de izolație mecanică, electrică, termică și de altă natură a circuitelor de măsurare și control de obiectele de control, precum și o mare capacitate. interval dinamic și capacitatea de a interfața direct cu nodurile logice standard.
Chipurile logice integrate produse industrial K1116KP1, K1116KP2, K1116KPZ, K1116KP4, K1116KP7, K1116KP8, K1116KP9 și K1116KP10 sunt chei electronice controlate de un câmp magnetic. Microcircuitele din această serie sunt dispozitive cu un grad scăzut de integrare, care conțin într-un cristal de siliciu un convertor de câmp magnetic și un dispozitiv electronic de amplificare și procesare a semnalului. Convertorul de câmp magnetic este un element Hall integral cu 4 electrozi, al cărui principiu de funcționare se bazează pe apariția unui EMF pe doi electrozi longitudinali, direct proporțional cu produsul dintre intensitatea câmpului magnetic și curentul care curge prin electrozii transversali. Microcircuitele sunt fabricate folosind tehnologia epiplanară și sunt ambalate într-un pachet de plastic cu 3-5 derivații cu cabluri plate rigide. Aspectul și desenele carcasei sunt prezentate în figură. Pătratul punctat în desene indică locația zonei de sensibilitate a elementului Hall (dimensiunile zonei pentru microcircuitele K1116KP9 și K1116KP10 sunt 1,5X 1,5 mm). Pe baza răspunsului lor la influența unui câmp magnetic extern, microcircuitele sunt împărțite în unipolare, al căror nivel de tensiune de ieșire depinde de valoarea de inducție a unui câmp magnetic de o polaritate, și bipolare, al căror nivel de tensiune de ieșire depinde de ambele valoarea de inducție și semnul (polaritatea) câmpului magnetic care acționează.
Microcircuitele unipolare K1116KP1, K1116KPZ, K1116KP9, K1116KP10 au o ieșire directă, semnalul pe care, în absența unui câmp magnetic, corespunde nivelului logic 1. Când inducerea câmpului magnetic extern crește la valoarea B>V SRAB , microcircuitul comută și nivelul semnalului la ieșire se schimbă brusc la zero logic. Microcircuitul unipolar K1116KP2 are o ieșire inversă, la care apare nivelul logic 1 atunci când este expus la un câmp magnetic cu inducție. Pe măsură ce temperatura microcircuitelor unipolare crește, crește valoarea de inducție/eliberare. Pe măsură ce temperatura cipurilor bipolare crește, inducerea acționării eliberării scade. Coeficientul de modificare a temperaturii în inducția de acționare și eliberare variază de la 0,01 la 0,05 mT/°C, în funcție de tipul de microcircuit. Imunitatea crescută la zgomot a microcircuitelor este asigurată de prezența histerezii (cu o inducție de 39 mT) în caracteristica de comutare.
Microcircuitele din seria K 1116 sunt proiectate pentru interfațarea cu circuitele integrate digitale ale tipurilor RTL, DTL, TTL, ESL, TLL și structurilor CMOS. Una dintre schemele posibile de cuplare este prezentată în figură. Rezistența minimă în ohmi a rezistorului R1 este determinată de formula R1min > Ucom / I o out. max, unde Ucom este tensiunea de comutare, I o out. max - curent de ieșire de nivel scăzut maxim.
Microcircuitele K1116KP1 și K1116KP2 au fiecare două ieșiri în mod comun cu un colector deschis și o intrare stroboscopică (pin 3) Atunci când la această intrare este aplicat un impuls stroboscopic cu nivelul 0, nivelul tensiunii de ieșire nu va depinde de influența unui semnal extern. câmp magnetic, adică „funcția” va fi implementată” Dacă intrarea stroboscopică nu este utilizată, aceasta trebuie conectată la firul de alimentare pozitiv.
MICROCIRCUITURI
SERIA KIII6
cipurile logice KSh6KP1, K1116KP2, KP16KPZ, KP 16KP4, K111LKP7, K1116KP8, K1116KP9 și KP16KP10 sunt o clasă specială de dispozitive semiconductoare, al căror principiu de funcționare se bazează pe o modificare a semnalului de ieșire extern atunci când este expus la un semnal magnetic extern. Cu alte cuvinte, aceste microcircuite îndeplinesc funcțiile cheilor electronice controlate de un câmp magnetic.
Microcircuitele controlate magnetic sunt utilizate pe scară largă ca elemente sensibile în senzorii magnetici orientați funcțional de curent electric și tensiune, viteză și direcție de rotație, unghi de rotație și poziția finală, debit de lichid și gaz etc. Ele sunt, de asemenea, utilizate în electrice fără contact (valve). motoare și dispozitive alarme de urgență și securitate, sisteme fără contact pentru aprinderea electronică a amestecului combustibil din motoarele cu ardere internă, sisteme auto
piciorul în echipamente radio de uz casnic, în detectoare de metale și detectoare de defecte, în siguranțe electronice, în tastaturi de calculator etc., etc.
Principalele avantaje ale microcircuitelor controlate magnetic în comparație cu alte convertoare de cantități fizice (neelectrice) sunt ușurința de a asigura izolarea mecanică, electrică, termică și alte tipuri aproape ideale a circuitelor de măsurare și control de obiectele de control, precum și o mare interval dinamic și capacitatea de a interfața direct cu nodurile logice standard.
Microcircuitele din această serie sunt dispozitive cu un grad scăzut de integrare, care conțin într-un cristal de siliciu un convertor de câmp magnetic și un dispozitiv electronic de amplificare și procesare a semnalului. Convertit
Câmpul magnetic este controlat de un element Hall integral cu 4 electrozi, al cărui principiu de funcționare se bazează pe apariția unei feme pe doi electrozi longitudinali. direct proporțional cu produsul dintre intensitatea câmpului magnetic și curentul care circulă prin electrozii transversali.
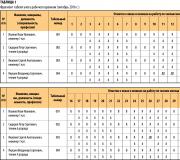
Microcircuitele sunt fabricate folosind tehnologia epiplanară și sunt ambalate într-un pachet de plastic cu 3 și 5 fire cu cabluri plate rigide. Aspectul și desenele carcasei sunt prezentate în Fig. Eu, iar pinout-ul este în tabel. 1, Pătratul punctat cu liniuță din desene indică locația zonei de sensibilitate a elementului Hall (dimensiunile zonei pentru microcircuite K1116KP9 și K1116KP10 sunt 1,5X 1,5 mm). Schema funcțională a unui microcircuit tipic este prezentată în Fig. 2. În funcție de reacția la influența unui câmp magnetic extern, microcircuitele sunt împărțite în Tabelul 1
Chip
Număr PIN
K1116KP1, KP16KP2
K1116KZ, K1116KP4 K1116KP7, K1116KP8
K1116KP9, K1116KP10
K1116KP9, K1116KP10
în unipolar, al cărui nivel de tensiune de ieșire depinde de valoarea de inducție a câmpului magnetic al unei polarități, și bipolar, al cărui nivel de tensiune de ieșire depinde atât de valoarea de inducție, cât și de semnul (polaritatea) câmpului magnetic activ.
(De continuat)
Material pregătit de M. BARANOCHNIKOV, V. PAPU
Moscova