The rule for adding vector quantities. Resultant force formula
When several forces are simultaneously applied to one body, the body begins to move with acceleration, which is the vector sum of the accelerations that would arise under the influence of each force separately. The rule of vector addition is applied to forces acting on a body and applied to one point.
Definition 1
The vector sum of all forces simultaneously acting on a body is the force resultant, which is determined by the rule of vector addition of forces:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
The resultant force acts on a body in the same way as the sum of all forces acting on it.
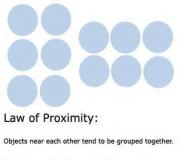
Definition 2To add 2 forces use rule parallelogram(picture 1).
Picture 1 . Addition of 2 forces according to the parallelogram rule
Let us derive the formula for the modulus of the resultant force using the cosine theorem:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
Definition 3
If it is necessary to add more than 2 forces, use polygon rule: from the end
The 1st force must draw a vector equal and parallel to the 2nd force; from the end of the 2nd force it is necessary to draw a vector equal and parallel to the 3rd force, etc.

Figure 2. Addition of forces using the polygon rule
The final vector drawn from the point of application of forces to the end of the last force is equal in magnitude and direction to the resultant force. Figure 2 clearly illustrates an example of finding the resultant forces from 4 forces: F 1 →, F 2 →, F 3 →, F 4 →. Moreover, the summed vectors do not necessarily have to be in the same plane.
The result of the force acting on a material point will depend only on its module and direction. A solid body has certain dimensions. Therefore, forces with the same magnitudes and directions cause different movements of a rigid body depending on the point of application.
Definition 4
Line of action of force called a straight line passing through the force vector.

Figure 3. Addition of forces applied to different points of the body
If forces are applied to different points of the body and do not act parallel to each other, then the resultant is applied to the point of intersection of the lines of action of the forces (Figure 3 ). A point will be in equilibrium if the vector sum of all forces acting on it is equal to 0: ∑ i = 1 n F i → = 0 → . In this case, the sum of the projections of these forces onto any coordinate axis is also equal to 0.
Definition 5Decomposition of forces into two components- this is the replacement of one force by 2, applied at the same point and producing the same effect on the body as this one force. The decomposition of forces is carried out, like addition, by the parallelogram rule.
The problem of decomposing one force (the modulus and direction of which are given) into 2, applied at one point and acting at an angle to each other, has a unique solution in the following cases when the following are known:
- directions of 2 component forces;
- module and direction of one of the component forces;
- modules of 2 component forces.
It is necessary to decompose the force F into 2 components located in the same plane with F and directed along straight lines a and b (Figure 4 ). Then it is enough to draw 2 straight lines from the end of the vector F, parallel to straight lines a and b. The segment F A and the segment F B represent the required forces.

Figure 4. Decomposition of the force vector in directions
Example 2
The second version of this problem is to find one of the projections of the force vector using the given force vectors and the 2nd projection (Figure 5 a).

Figure 5. Finding the projection of the force vector from given vectors
In the second version of the problem, it is necessary to construct a parallelogram along the diagonal and one of the sides, as in planimetry. Figure 5 b shows such a parallelogram and indicates the desired component F 2 → force F → .
So, the 2nd solution: add to the force a force equal to - F 1 → (Figure 5 c). As a result, we obtain the desired force F →.
Example 3
Three forces F 1 → = 1 N; F 2 → = 2 N; F 3 → = 3 N are applied to one point, are in the same plane (Figure 6 a) and make angles with the horizontal α = 0 °; β = 60°; γ = 30° respectively. It is necessary to find the resultant force.
Solution

Figure 6. Finding the resultant force from given vectors
Let's draw mutually perpendicular axes O X and O Y so that the O X axis coincides with the horizontal along which the force F 1 → is directed. Let's make a projection of these forces onto the coordinate axes (Figure 6 b). The projections F 2 y and F 2 x are negative. The sum of the projections of forces onto the coordinate axis O X is equal to the projection onto this axis of the resultant: F 1 + F 2 cos β - F 3 cos γ = F x = 4 - 3 3 2 ≈ - 0.6 N.
Similarly, for projections onto the O Y axis: - F 2 sin β + F 3 sin γ = F y = 3 - 2 3 2 ≈ - 0.2 N.
We determine the modulus of the resultant using the Pythagorean theorem:
F = F x 2 + F y 2 = 0.36 + 0.04 ≈ 0.64 N.
We find the direction of the resultant using the angle between the resultant and the axis (Figure 6 c):
t g φ = F y F x = 3 - 2 3 4 - 3 3 ≈ 0.4.
Example 4
A force F = 1 kN is applied at point B of the bracket and is directed vertically downward (Figure 7 a). It is necessary to find the components of this force in the directions of the bracket rods. All necessary data is shown in the figure.
Solution

Figure 7. Finding the components of force F in the directions of the bracket rods
Given:
F = 1 k N = 1000 N
Let the rods be screwed to the wall at points A and C. Figure 7 b shows the decomposition of the force F → into components along the directions A B and B C. From here it is clear that
F 1 → = F t g β ≈ 577 N;
F 2 → = F cos β ≈ 1155 N.
Answer: F 1 → = 557 N; F 2 → = 1155 N.
If you notice an error in the text, please highlight it and press Ctrl+Enter
This is the vector sum of all forces acting on the body.
The cyclist leans towards the turn. The force of gravity and the reaction force of the support from the earth provide a resultant force that imparts the centripetal acceleration necessary for motion in a circle
Relationship with Newton's second law
Let's remember Newton's law: 

The resultant force can be equal to zero in the case when one force is compensated by another, the same force, but opposite in direction. In this case, the body is at rest or moving uniformly.
If the resultant force is NOT zero, then the body moves with uniform acceleration. Actually, it is this force that causes the uneven movement. Direction of resultant force Always coincides in direction with the acceleration vector.
When it is necessary to depict the forces acting on a body, while the body moves with uniform acceleration, it means that in the direction of acceleration the acting force is longer than the opposite one. If the body moves uniformly or is at rest, the length of the force vectors is the same.
Finding the resultant force
In order to find the resultant force, it is necessary: firstly, to correctly designate all the forces acting on the body; then draw coordinate axes, select their directions; in the third step it is necessary to determine the projections of the vectors on the axes; write down the equations. Briefly: 1) identify the forces; 2) select the axes and their directions; 3) find the projections of forces on the axis; 4) write down the equations.
How to write equations? If in a certain direction the body moves uniformly or is at rest, then the algebraic sum (taking into account signs) of the projections of forces is equal to zero. If a body moves uniformly accelerated in a certain direction, then the algebraic sum of the projections of forces is equal to the product of mass and acceleration, according to Newton’s second law.
Examples
A body moving uniformly on a horizontal surface is subject to the force of gravity, the reaction force of the support, the force of friction and the force under which the body moves.
Let us denote the forces, choose the coordinate axes

Let's find the projections

Writing down the equations

A body that is pressed against a vertical wall moves downward with uniform acceleration. The body is acted upon by the force of gravity, the force of friction, the reaction of the support and the force with which the body is pressed. The acceleration vector is directed vertically downwards. The resultant force is directed vertically downwards.


The body moves uniformly along a wedge whose slope is alpha. The body is acted upon by the force of gravity, the reaction force of the support, and the force of friction.


The main thing to remember
1) If the body is at rest or moving uniformly, then the resultant force is zero and the acceleration is zero;
2) If the body moves uniformly accelerated, then the resultant force is not zero;
3) The direction of the resultant force vector always coincides with the direction of acceleration;
4) Be able to write equations of projections of forces acting on a body
A block is a mechanical device, a wheel that rotates around its axis. Blocks can be mobile And motionless.
Fixed block used only to change the direction of force.

Bodies connected by an inextensible thread have equal accelerations.
Movable block designed to change the amount of effort applied. If the ends of the rope clasping the block make equal angles with the horizon, then lifting the load will require a force half as much as the weight of the load. The force acting on a load is related to its weight as the radius of a block is to the chord of an arc encircled by a rope.

The acceleration of body A is half the acceleration of body B.
In fact, any block is lever arm, in the case of a fixed block - equal arms, in the case of a movable one - with a ratio of shoulders of 1 to 2. As for any other lever, the following rule applies to the block: the number of times we win in effort, the same number of times we lose in distance
A system consisting of a combination of several movable and fixed blocks is also used. This system is called a polyspast.

A) circle.
C) parabola.
D) the trajectory can be any.
E) straight.
2. If the bodies are separated by airless space, then heat transfer between them is possible
A) thermal conductivity and convection.
B) radiation.
C) thermal conductivity.
D) convection and radiation.
E) convection.
3. Electrons and neutrons have electrical charges
A) electron – negative, neutron – positive.
B) electron and neutron – negative.
C) electron – positive, neutron – negative.
D) electron and neutron – positive.
E) electron – negative, neutron – has no charge.
4. The current required to perform work equal to 250 J with a light bulb rated at 4V and for 3 minutes is equal to
5. As a result of a spontaneous transformation, the nucleus of a helium atom flew out of the atomic nucleus as a result of the following radioactive decay
A) gamma radiation.
B) two-proton decay.
C) alpha decay.
D) proton decay.
E) beta decay.
6. A point on the celestial sphere, which is designated by the same sign as the constellation Cancer, is a point
A) parade of planets
B) vernal equinox
C) autumnal equinox
D) summer solstice
E) winter solstice
7. The movement of a truck is described by the equations x1= - 270 + 12t, and the movement of a pedestrian along the side of the same highway by the equation x2= - 1.5t. The meeting time is
8. If a body is thrown upward at a speed of 9 m/s, then it will reach its maximum height in (g = 10 m/s2)
9. Under the influence of a constant force equal to 4 N, a body with a mass of 8 kg will move
A) uniformly accelerated with an acceleration of 0.5 m/s2
B) uniformly accelerated with an acceleration of 2 m/s2
C) uniformly accelerated with an acceleration of 32 m/s2
D) uniformly at a speed of 0.5 m/s
E) uniformly at a speed of 2 m/s
10. The power of the trolleybus traction motor is 86 kW. The work that can be done by the engine in 2 hours is
A) 619200 kJ.
C) 14400 kJ.
E) 17200 kJ.
11. Potential energy of an elastically deformed body when the deformation increases by 4 times
A) will not change.
B) will decrease by 4 times.
C) will increase 16 times.
D) will increase by 4 times.
E) will decrease by 16 times.
12. Balls with masses m1 = 5 g and m2 = 25 g move towards each other at speeds υ1 = 8 m/s and υ2 = 4 m/s. After an inelastic impact, the speed of the ball m1 is equal (the direction of the coordinate axis coincides with the direction of motion of the first body)
13. With mechanical vibrations
A) only potential energy is constant
B) both potential energy and kinetic energy are constant
C) only kinetic energy is constant
D) only the total mechanical energy is constant
E) energy is constant in the first half of the period
14. If tin is at the melting point, then melting 4 kg will require an amount of heat equal to (J/kg)
15. An electric field of intensity 0.2 N/C acts on a charge of 2 C with a force
16. Establish the correct sequence of electromagnetic waves as the frequency increases
1) radio waves, 2) visible light, 3) x-rays, 4) infrared radiation, 5) ultraviolet radiation
A) 4, 1, 5, 2, 3
B) 5, 4, 1, 2, 3
C) 3, 4, 5, 1, 2
D) 2, 1, 5, 3, 4
E) 1, 4, 2, 5, 3
17. A student cuts sheet metal by applying a force of 40 N to the handles of the scissors. The distance from the axis of the scissors to the point of application of the force is 35 cm, and the distance from the axis of the scissors to the sheet metal is 2.5 cm. The force required to cut the sheet metal
18. The area of the small piston of a hydraulic press is 4 cm2, and the area of the large one is 0.01 m2. The pressure force on the large piston is greater than the pressure force on the small piston in
B) 0.0025 times
E) 0.04 times
19. A gas, expanding at a constant pressure of 200 Pa, did 1000 J of work. If the gas initially occupied a volume of 1.5 m, then the new volume of gas is equal to
20. The distance from the object to the image is 3 times greater than the distance from the object to the lens. This is a lens...
A) biconcave
B) flat
C) collecting
D) scattering
E) flat-concave
Section 1. "STATICS"
Newtons
The arm of a force is the shortest distance from a point to the line of action of the force
The product of the force on the arm is equal to the moment of the force.
8. Formulate the “right hand rule” for determining the direction of the moment of force.
9. How is the main moment of a system of forces relative to a point determined?
The main moment relative to the center is the vector sum of the moments of all forces applied to the body relative to the same center.
10. What is called a pair of forces? What is the moment of a pair of forces? Does it depend on the choice of point? What is the direction and magnitude of the moment of a pair of forces?
A force pair is a system of forces in which the forces are equal, parallel and opposite to each other. The moment is equal to the product of one of the forces on the shoulder, does not depend on the choice of point, and is directed perpendicular to the plane in which the pair lies.
11. State Poinsot’s theorem.
Any system of forces acting on an absolutely rigid body can be replaced by one force and one pair of forces. In this case, the force will be the main vector, and the moment of the couple will be the main moment of this system of forces.12. Formulate necessary and sufficient conditions for the equilibrium of a system of forces.
For the equilibrium of a plane system of forces, it is necessary and sufficient that the algebraic sums of the projections of all forces onto two coordinate axes and the algebraic sum of the moments of all forces relative to an arbitrary point are equal to zero. The second form of the equilibrium equation is the equality to zero of the algebraic sums of the moments of all forces relative to any three points that do not lie on the same straight line
14. What systems of forces are called equivalent?
If, without disturbing the state of the body, one system of forces (F 1, F 2, ..., F n) can be replaced by another system (P 1, P 2, ..., P n) and vice versa, then such systems of forces are called equivalent
15. What force is called the resultant of this system of forces?
When a system of forces (F 1, F 2, ..., F n) is equivalent to one force R, then R is called. resultant. The resultant force can replace the action of all given forces. But not every system of forces has a resultant.
16. It is known that the sum of the projections of all forces applied to the body onto a given axis is equal to zero. What is the direction of the resultant of such a system?
17. Formulate the axiom of inertia (Galileo’s principle of inertia).
Under the influence of mutually balancing forces, a material point (body) is at rest or moves rectilinearly and uniformly
28. Formulate the axiom of equilibrium between two forces.
Two forces applied to an absolutely rigid body will be balanced if and only if they are equal in magnitude, act in the same straight line and are directed in opposite directions
19. Is it possible to transfer a force along its line of action without changing the kinematic state of an absolutely rigid body?
Without changing the kinematic state of an absolutely rigid body, the force can be transferred along the line of its action, keeping its modulus and direction unchanged.
20. Formulate the axiom of the parallelogram of forces.
Without changing the state of the body, two forces applied to one point can be replaced by one resultant force applied at the same point and equal to their geometric sum
21. How is Newton's third law formulated?
Every action has an equal and opposite reaction
22. Which solid body is called non-free?
The forces acting between the bodies of the system are called internal.
Articulated and movable support. This type of connection is structurally made in the form of a cylindrical hinge that can move freely along the surface. The reaction of the articulated movable support is always directed perpendicular to the supporting surface
Hinged-fixed support. The reaction of a hinged-fixed support is represented in the form of unknown components and , the lines of action of which are parallel or coincide with the coordinate axes
29. Which support is called rigid embedding (pinching)?
This is an unusual type of connection, since in addition to preventing movement in the plane, the rigid seal prevents the rotation of the rod (beam) relative to the point. Therefore, the coupling reaction is reduced not only to the reaction (,), but also to the reactive moment
30. What support is called a thrust bearing?
Thrust bearing and spherical hinge This type of connection can be represented in the form of a rod having a spherical surface at the end, which is attached to a support, which is part of a spherical cavity. A spherical hinge prevents movement in any direction in space, so its reaction is represented in the form of three components , , , parallel to the corresponding coordinate axes
31. Which support is called a spherical joint?
32. What system of forces is called convergent? How are the equilibrium conditions for a system of converging forces formulated?
If a (absolutely rigid) body is in equilibrium under the action of a plane system of three non-parallel forces (i.e. forces, at least two of which are non-parallel), then their lines of action intersect at one point.
34. What is the sum of two parallel forces directed in the same direction? In different directions?
the resultant of two parallel forces F 1 and F 2 of the same direction has the same direction, its modulus is equal to the sum of the moduli of the component forces, and the application point divides the segment between the points of application of the forces into parts inversely proportional to the moduli of the forces: R = F 1 + F 2 ; AC/BC=F 2 /F 1. The resultant of two oppositely directed parallel forces has a direction of force that is larger in magnitude and a magnitude equal to the difference in the magnitudes of the forces.
37. How is Varignon’s theorem formulated?
If the plane system of forces under consideration is reduced to a resultant, then the moment of this resultant relative to any point is equal to the algebraic sum of the moments of all forces of the given system relative to that same point.
40. How is the center of parallel forces determined?
According to Varignon's theorem
41. How is the center of gravity of a solid body determined?
45. Where is the center of gravity of the triangle?
Median intersection point
46. Where is the center of gravity of the pyramid and cone?
Section 2. “KINEMATICS”
1. What is called the trajectory of a point? What motion of a point is called rectilinear? Curvilinear?
The line along which material moves dot , called trajectory .
If the trajectory is a straight line, then the movement of the point is called rectilinear; if the trajectory is a curved line, then the movement is called curvilinear
2. How is the Cartesian rectangular coordinate system defined?
3. How is the absolute speed of a point in a stationary (inertial) coordinate system determined? What is the direction of the velocity vector in relation to its trajectory? What are the projections of the velocity of a point on the Cartesian coordinate axis?
For a point, these dependencies are as follows: the absolute speed of a point is equal to the geometric sum of the relative and portable speeds, that is:
![]()
![]() .
.
3. How is the absolute acceleration of a point in a stationary (inertial) coordinate system determined? What are the projections of the acceleration of a point on the Cartesian coordinate axis?
5. How is the angular velocity vector of a rigid body determined when it rotates around a fixed axis? What is the direction of the angular velocity vector?
Angular velocity- vector physical quantity characterizing the speed of rotation of the body. The angular velocity vector is equal in magnitude to the angle of rotation of the body per unit time:
a is directed along the axis of rotation according to the gimlet rule, that is, in the direction into which a gimlet with a right-hand thread would be screwed if it rotated in the same direction.
6. How is the angular acceleration vector of a rigid body determined when it rotates around a fixed axis? What is the direction of the angular acceleration vector?
When a body rotates around a fixed axis, the angular acceleration in magnitude is equal to:

The angular acceleration vector α is directed along the axis of rotation (to the side during accelerated rotation and in the opposite direction during slow rotation).
When rotating around a fixed point, the angular acceleration vector is defined as the first derivative of the angular velocity vector ω with respect to time, that is
8. What are the absolute, portable and relative speeds of a point during its complex motion?
9. How are portable and relative accelerations determined during complex motion of a point?
10. How is Coriolis acceleration determined during complex motion of a point?
11. State the Coriolis theorem.
Acceleration addition theorem (Coriolis theorem): ![]() , Where
, Where ![]() – Coriolis acceleration (Coriolis acceleration) – in the case of non-translational portable motion, absolute acceleration = the geometric sum of portable, relative and Coriolis accelerations.
– Coriolis acceleration (Coriolis acceleration) – in the case of non-translational portable motion, absolute acceleration = the geometric sum of portable, relative and Coriolis accelerations.
12. At what movements are the points equal to zero:
a) tangential acceleration?
b) normal acceleration?
14. What body movement is called translational? What are the velocities and accelerations of the points of the body during such movement?
16. What body movement is called rotational? What are the velocities and accelerations of the points of the body during such movement?
17. How are the tangential and centripetal accelerations of a point on a rigid body rotating around a fixed axis expressed?
18. What is the geometric location of the points of a rigid body rotating around a fixed axis, the velocities of which at a given moment have the same magnitude and the same direction?
19. What motion of a body is called plane-parallel? What are the velocities and accelerations of the points of the body during such movement?
20. How is the instantaneous center of velocity of a flat figure moving in its plane determined?
21. How can you graphically find the position of the instantaneous center of velocities if the velocities of two points of a plane figure are known?
22. What will be the velocities of the points of a flat figure in the case when the instantaneous center of rotation of this figure is infinitely distant?
23. How are the projections of the velocities of two points of a plane figure onto a straight line connecting these points related to each other?
24. Given two points ( A And IN) of a moving flat figure, and it is known that the speed of the point A perpendicular to AB. How is the speed of the point directed? IN?
Section 1. "STATICS"
1. What factors determine the force acting on a solid?
2. In what units is force measured in the SI system?
Newtons
3. What is the main vector of the force system? How to construct a force polygon for a given system of forces?
The main vector is the vector sum of all forces applied to the body
5. What is called the moment of force relative to a given point? What is the direction of the moment of force relative to the force vector and the radius vector of the point of application of the force?
The moment of a force relative to a point (center) is a vector that is numerically equal to the product of the modulus of the force by the arm, i.e., by the shortest distance from the specified point to the line of action of the force. It is directed perpendicular to the plane of propagation of force and r.v. points.
6. In what case is the moment of a force relative to a point equal to zero?
When the arm is equal to 0 (The center of the moments is located on the line of action of the force)
7. How is the leverage of a force relative to a point determined? What is the product of force and arm?